- Преподавателю
- Математика
- Разработка на тему Движение
Разработка на тему Движение
| Раздел | Математика |
| Класс | - |
| Тип | Другие методич. материалы |
| Автор | Тулькубаев М.М. |
| Дата | 29.08.2015 |
| Формат | docx |
| Изображения | Есть |

 ВВЕДЕНИЕ
ВВЕДЕНИЕ
В геометрии применяются различные методы решения задач - это синтетический (чисто геометрический) метод, метод преобразований, векторный, метод координат и другие. Они занимают различное положение в школе. Основным методом считается синтетический, а из других наиболее высокое положение занимает метод преобразований (в частности, движения плоскости) потому, что он тесно связан с алгеброй, физикой, химией, биологией, техникой и т. д. Это сближает математику с данными областями наук. Методы геометрических преобразований позволяют решать большой класс задач элементарной геометрии: задачи на доказательство, построение, вычисление, нахождение геометрических мест точек.
Можно с уверенностью говорить о том, что изучение движений плоскости является неотъемлемой частью школьного курса геометрии. В процессе изучения данной темы учащиеся развивают свое логическое мышление, алгебраическое вычисление, аккуратность при построении чертежей, в результате у учащихся повышается интерес к такой дисциплине как геометрия. Поэтому необходим комплекс задач, решаемых методом движений, позволяющий учащимся научиться решать разнообразные задачи с помощью движений плоскости. Этим и определяется актуальность выбранной темы: «Метод движений в решении геометрических задач на плоскости».
Объект исследования данной работы - решение геометрических задач на плоскости.
Предметом исследования является метод движений плоскости в школьном курсе геометрии.
Цель работы - разработать комплекс задач, решаемых методом движений.
Цель, объект и предмет работы определяют следующие задачи:
1) дать описание метода параллельного переноса, поворота, центральной симметрии, осевой симметрии, скользящей симметрии;
2) на основе анализа учебных пособий федерального комплекта разработать комплексы задач, решаемых методом движений.
Для решения поставленных задач использовались следующие методы:
1) анализ школьной программы по геометрии, учебных пособий федерального комплекта, методических материалов, интернет-сайтов по теме исследования;
2) сравнение и обобщение.
Данная курсовая работа состоит из введения, двух глав, заключения, списка использованных источников, приложений.
Во введении обосновывается актуальность проблемы исследования, сформулированы цель, объект, предмет, задачи и методы исследования.
В первой главе описаны теоретические основы темы «Движения плоскости», а именно, понятия отображений и преобразований множеств, понятие «движения плоскости», примеры движений плоскости, два вида движений, аналитическое выражение движения, классификация движений плоскости.
Во второй главе проведен анализ школьных учебников по геометрии, входящих в федеральный комплект, с точки зрения содержательного компонента темы «Движения плоскости», разработан комплекс задач, решаемых методом движений.
В заключении содержатся выводы по работе.
1 Теоретические основы темы «движения плоскости»
1.1 Отображение и преобразование множеств
Пусть Х, Y - непустые множества и G  Х × Y. Если (х, у)
Х × Y. Если (х, у)  G, то говорят, что элементу х Х соответствует элемент у Y относительно G.
G, то говорят, что элементу х Х соответствует элемент у Y относительно G.
Тройка (G, Х, Y) = Г, где G Х × Y, называется соответствием между множеством Х и множеством Y. Обозначим через npiG (i = 1, 2) множество
i - х проекций для всех (х, у) G. Употребляют такие названия: G - график соответствия Г; Х - область отправления; Y - область прибытия; np1G - область определения; np2G - область значений соответствия Г.
Пример. Зададим на плоскости прямоугольную систему координат
{O,  ,
,  } и возьмем два множества (рис. 1):
} и возьмем два множества (рис. 1):
X = {x R  M (x, 0) [OA]},
M (x, 0) [OA]},
Y = {y R M (0, y) [OB]}.
Тогда X × Y = {(x, y) | M (x, y) - точка прямоугольника ОАСВ}. Пусть Ğ - некоторое непустое множество точек прямоугольника ОАСВ. Тогда
G = {(x, y) | M (x, y) Ğ} является подмножеством множества X × Y. Оно определяет соответствие Г = (G, X, Y) с областью определения
np1G = {x X | M (x, 0) [ST]} и областью значений np2G = {y Y | M (0, y) [KL]}.
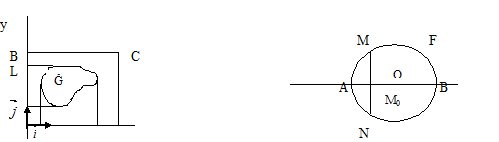
Рисунок 1 Рисунок 2
Частным случаем соответствия является функция. Соответствие f = (G, X, Y) называется функцией, если для каждого x np1G (т.е. для каждого х из области определения соответствия f) существует единственный элемент у Y | (x, y) G. Этот элемент y Y называют значением функции f для элемента х Х и обозначают через f(x).
Если область определения функции f совпадает с множеством Х:
np1G = X, то говорят, что f есть отображение множества Х в множество Y. Пишут: f: X → Y или Х  Y.
Y.
Следовательно, всякая функция f = (G, X, Y) является отображением своей области определения np1G в множество Y.
Элемент у = f (x) называют образом элемента х, а х - прообразом элемента у в отображении f. Говорят также, что х переходит в у при отображении f.
Отметим важнейшие частные случаи отображений f: X → Y.
1) Если х1 ≠ х2  f (x1) ≠ f (x2) для
f (x1) ≠ f (x2) для  х1, х2 Х, то f называют взаимно однозначным отображением Х в Y или инъекцией.
х1, х2 Х, то f называют взаимно однозначным отображением Х в Y или инъекцией.
2) Пусть f (X) - образ множества Х в отображение f, т.е. f (X) = {f(x) | x X}. Если f (X) = Y, то отображение f называется отображением множества Х на Y или сюръекцией.
3) Отображение f называется биекцией или взаимно однозначным отображением Х на Y, если оно одновременно инъективно и сюръективно.
Пример 1. Пусть (О) - окружность с центром О, [AB] - ее диаметр (рис.2). Обозначим через f соответствие между окружностью (О) и прямой (АВ), установленное по следующему закону: Каждой точке М (О) ставим в соответствие точку f (М) = М0 - ортогональную проекцию точки М на прямую (АВ).
Подмножество G (O) × (AB) - график соответствия определяется указанным законом. Очевидно, это соответствие является отображением
f: (O) → (AB); оно не инъективно (f (M) = f (N) при M ≠ N, см. рисунок) и не сюръективно (f ((O)) = [AB] ≠ (AB)).
Вместо окружности (О) возьмем ее полуокружность F с концами в точках А и В.
Ортогональное проектирование f точек М F на прямую (АВ) будет теперь инъекцией f: F → (AB), но не сюръекцией (f (F) = [AB] ≠ (AB)).
Пример 2. Дан треугольник АВС и точки В1 [AB), C1 [AC), отличные от точки А (рис.3). Пусть f - соответствие между отрезками [BC] и [B1C1], установленное по закону: каждой точке М [BC] ставим в соответствие точку М1 = (АМ) ∩ (В1С1). Легко видеть, что здесь мы имеем биекцию f: [BC]  →[B1C1].
→[B1C1].
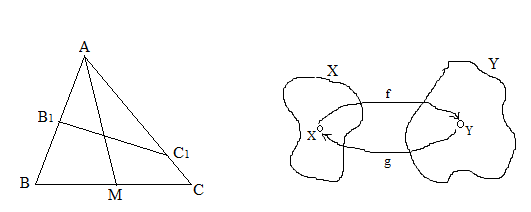
Рисунок 3 Рисунок 4
Замечание. По определению всякое отображение f: X → Y можно рассматривать как сюръекцию f: X → f (X). Точно также инъекция f: X → Y приводит к биекции f: X → f (X).
В примере 1 мы имеем сюръекцию f: (O) → [AB] и биекцию f: F → [AB].
Пусть дана биекция f: X → Y (рис.4). Мы можем построить другое отображение g: Y → X по закону: g (y) = x, если y = f (x). Получим биективное отображение Y на Х, которое обычно обозначают не через g, а через f -1 и называют отображением, обратным к f.
Имеем:
f -1(y) = x.
Преобразованием множества Х ≠ Ø называется всякая биекция f этого множества на себя: f: X → X.
При этом всякое подмножество F X переходит в некоторое подмножество F/ = f (F) X.
Элемент х (подмножество F) называют неподвижным или инвариантным элементом (подмножеством) в преобразовании f, если f (x) = x (соответственно: f (F) = F).
Замечание. Иногда всякую сюръекцию Х на Y называют преобразованием множества Х в множество У.
1.2 Движения плоскости
Говорят, что преобразование плоскости сохраняет расстояния, если расстояние между любыми двумя точками А и В плоскости равно расстоянию между их образами А/ и В/, т. е. АВ = А/ В/.
Определение. Преобразование плоскости, сохраняющее расстояние, называется движением (или перемещением).
Наиболее простым примером движения является тождественное преобразование плоскости, т. е. преобразование, при котором каждая точка плоскости переходит в себя.
Определение. Упорядоченную тройку точек А, В, С плоскости, не лежащих на одной прямой, называют репером и обозначают так: R = (А, В, С). Точки А, В и С называются вершинами репера, причем точка А называется ее началом. Репер называется аффинным, если треугольник АВС произвольный, и ортонормированным, если угол А прямой, а АВ = АС = 1.
Пусть на плоскости дана система координат О 1
1 2. Отложив от точки О векторы
2. Отложив от точки О векторы  1 =
1 =  1,
1,  2 = 2, получим репер R = (O, E1, E2), о котором мы скажем, что он соответствует системе координат О
2 = 2, получим репер R = (O, E1, E2), о котором мы скажем, что он соответствует системе координат О 12. Если данная система координат аффинная, то R - аффинный репер, а если система координат прямоугольная, то репер R ортонормированный. Обратно, если дан репер R = (О, Е1, Е2), то можно построить систему координат О1
12. Если данная система координат аффинная, то R - аффинный репер, а если система координат прямоугольная, то репер R ортонормированный. Обратно, если дан репер R = (О, Е1, Е2), то можно построить систему координат О1 2, где 1 = 1,
2, где 1 = 1,
2 =  2, которой соответствует репер R.
2, которой соответствует репер R.
Рассмотрим некоторые примеры преобразований плоскости П.
Пример 1. Возьмем вектор  || П. Отображение f: П → П по закону: f(M) = M/
|| П. Отображение f: П → П по закону: f(M) = M/ =
=  является преобразованием плоскости П и называется параллельным переносом (или просто переносом) плоскости П, а вектор
является преобразованием плоскости П и называется параллельным переносом (или просто переносом) плоскости П, а вектор  при этом называется вектором переноса f (рис. 5).
при этом называется вектором переноса f (рис. 5).
Возьмем в плоскости П ортонормированный репер R = {O, ,
, }, и пусть
}, и пусть  = x0
= x0 + y0
+ y0 . Если M (x, y) и f (M) = M/ (x/, y/) в репере R, то
. Если M (x, y) и f (M) = M/ (x/, y/) в репере R, то
 /=
/=

 (a)
(a)
Формулы (а) выражают координаты x/, y/ точки M/ = f (M) через координаты х, у точки М в одном и том же репере R. Обратно, если дан ортонормированный репер R = {O, ,
, } в плоскости П, то формулы (а) определяют отображение f: {M(x, y)} → {M/(x/, y/)}, которое является преобразованием плоскости П.
} в плоскости П, то формулы (а) определяют отображение f: {M(x, y)} → {M/(x/, y/)}, которое является преобразованием плоскости П.
(а) (x/ - x = x0, y/ - y = y0)  /
/  = x0
= x0 + y0
+ y0 .
.
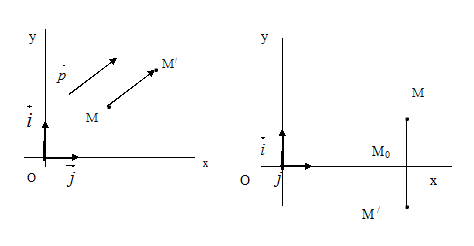
Рисунок 5 Рисунок 6
Итак, преобразование f - перенос,  - вектор переноса.
- вектор переноса.
Из формул (а) следует:
а) перенос f на вектор  ≠
≠  не имеет инвариантных точек;
не имеет инвариантных точек;
б) перенос f на вектор  =
=  есть тождественное преобразование, т.е. оставляет каждую точку неподвижной;
есть тождественное преобразование, т.е. оставляет каждую точку неподвижной;
в) перенос f любую прямую а, заданную в репере R уравнением:
Ах + Ву + С = 0, переводит в параллельную ей прямую а/, уравнение которой в репере R:
Ax/ + By/ - (Ax0 + By0 - C) = 0.
Если вектор переноса = x0 + y0 параллелен прямой а,
+ y0 параллелен прямой а,
(x0 = λB, y0 = - λA), то f (a) = a.
Пример 2. Две точки М, М/ называются симметричными относительно прямой d, если d  (MM/) и прямая d проходит через середину М0 отрезка [MM/]. Каждая точка прямой d считается симметричной самой себе (рис. 6).
(MM/) и прямая d проходит через середину М0 отрезка [MM/]. Каждая точка прямой d считается симметричной самой себе (рис. 6).
Если на плоскости дана прямая d, то мы можем определить отображение f: П→ П по закону: f (M) = M/когда точка М/ симметрична М относительно прямой d. Так мы получим преобразование плоскости, которое называется осевой симметрией (или отражением от прямой d); прямая d называется осью симметрии.
Отражение от прямой d будем обозначать той же буквой d и писать: d(M)= = M/.
Замечание. Ось симметрии d не является осью в обычном смысле, так как отражение от прямой d вполне определяется заданием этой прямой, без указания положительного направления на ней.
Возьмем ортонормированный репер R = {O, , } | Od, || d и обозначим через х, у координаты точки М, а через x/, y/ координаты точки
М/ = d(M) в репере R. Если М  d, M0 - середина отрезка [MM/], то из отношений (ММ/) d,
d, M0 - середина отрезка [MM/], то из отношений (ММ/) d,  = -
= -  = - y
= - y следуют формулы:
следуют формулы:
х/ = х,
(б)
у/ = - у.
Если M d, то M/ = M, x/ = x, y/ = 0, y = 0. Итак, формулы (б) выражают координаты х/, у/ точки М/ = d(M) через координаты х, у точки М в репере R. Обратно, если дан ортонормированный репер R = {O,  ,}, то формулы (б) определяют отображение f: {M (x, y)} → {M/ (x/, y/)}, которое является преобразованием плоскости. Если М (Ох), то у = 0, (б) М/ = М.
,}, то формулы (б) определяют отображение f: {M (x, y)} → {M/ (x/, y/)}, которое является преобразованием плоскости. Если М (Ох), то у = 0, (б) М/ = М.
Если М(Ох), то (б) (ММ/) (Ох), [MM/] ∩ (Ox) = M0 
Следовательно, преобразование f есть отражение от оси (Ох).
В отражении от прямой d имеем:
а) каждая точка прямой d инвариантна;
б) М d d (M) ≠ M;
в) прямая d инвариантна;
г) b d прямая b инвариантна;
д) c || d d (c) || d;
(а), (б) d = {M | d (M) = M}.
Пример 3. Пусть на ориентированной плоскости П даны направленный угол АВС, величина которого α, и точка О. Определим отображение f: П → П по закону:
1) f (O) = O;
2) если f (M) = M/ (M ≠ O), то:
а) ρ (O, M) = ρ (O, M/);
б) угол МОМ/ имеет величину α заданного угла АВС и одинаково с ним ориентирован (рис. 7).
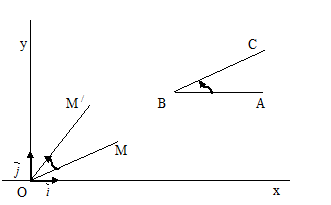
Рис. 7
Так мы получаем преобразование плоскости, которое называется поворотом (или вращением) плоскости вокруг точки О на угол α. Точка О называется центром поворота, а величина α направленного угла АВС называется углом поворота.
Заметим, что если f и f / - два поворота вокруг точки О соответственно на угол α и
α/ =  то f = f /.
то f = f /.
Следовательно, угол α поворота f вокруг точки О всегда можно выбрать так, что | α | ≤ π, и, значит можно считать α =  .
.
Если α ≠ 0, М ≠ 0, то f (M) ≠ M.
Если α = 0, то f (M) = M (M П) и, следовательно, f - тождественное преобразование.
Возьмем на плоскости ортонормированный репер R = {O, , }. Пусть f - поворот плоскости вокруг точки О на угол α; x, y - координаты точки М,x/, y/ - координаты точки М/ = f (M) в репере R. Тогда ( ,
,  / ) = α,
/ ) = α,
ρ (O, M) = ρ (O, M/) =  .
.
Из формул:
 (*)
(*)
получим:
x/ = x cos α - y sin α,
(в)
y/ = x sin α + y cos α.
Формулы (в) выражают координаты х/, у/ точки М/ = f (M) через координаты х, у точки М в одном и том же репере R. Обратно, если дан ортонормированный репер R = {O, ,}, то формулы (в) определяют отображение f: {M (x, y)} → {M/ (x/, y/)}.
,}, то формулы (в) определяют отображение f: {M (x, y)} → {M/ (x/, y/)}.
Из формул (в) получаем:
f (O) = O, x/2 + y/2 = x2 + y2 ρ (O, M) = ρ (O, M/). Если M ≠ 0, то
М/ = f (M) ≠ 0.
Пусть φ = ( ,/). Тогда по формулам (*) имеем:
,/). Тогда по формулам (*) имеем:
Итак, преобразование f, определяемое формулами (в) в репере R, есть поворот плоскости вокруг точки О на угол α.
Пример 4. Точки М, М/ плоскости П называют симметричными относительно точки О, если О - середина отрезка [MM/]; точка О считается симметричной самой себе.
Отображение f: П→ П по закону: f (M) = M/ когда М, М/ симметричны относительно точки О, является преобразованием плоскости и называется симметрией плоскости относительно точки О (или центральной симметрией, или, наконец, отражением от точки О). Точка О называется центром симметрии. Легко заметить, что центральная симметрия является поворотом плоскости вокруг центра симметрии О на угол α = π и, следовательно, в ортонормированном репере R = {O, , } определяется формулами:
х/ = - х,
(в/)
у/ = - у.
Любая прямая (MN), уравнение которой в репере R = {O, ,  }
}
Ax + By + C = 0,
переходит в прямую (M/ N/), параллельную прямой (MN), имеющую в репере R уравнение Ax/ + By/ - C = 0 (рис. 8).
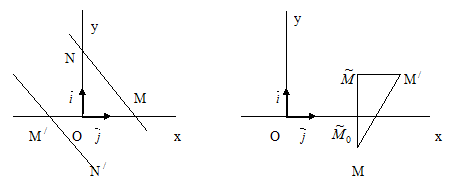
Рис. 8 Рис. 9
Пример 5. Если d - осевая симметрия, g - перенос плоскости на вектор
 ≠
≠ , || d, то преобразование f = gd называется скользящей симметрией (или скользящим отображением).
, || d, то преобразование f = gd называется скользящей симметрией (или скользящим отображением).
Возьмем ортонормированный репер R = {O,  ,
,  } | O d, || d (рис. 9), и пусть в репере R: M (x, y), d (M) =
} | O d, || d (рис. 9), и пусть в репере R: M (x, y), d (M) =  (
( ,
,  ), g (
), g ( ) = M/ (x/, y/),
) = M/ (x/, y/),  = x0. Тогда формулы (б), (а) преобразований d и g в репере R имеют вид:
= x0. Тогда формулы (б), (а) преобразований d и g в репере R имеют вид:
d:  (*) g:
(*) g:  (**)
(**)
(*), (**) f:  (г)
(г)
Формулы (г) выражают координаты х/, у/ точки М/ = f (M) через координаты х, у точки М в репере R. Обратно, если дан ортонормированный репер R = {O, , }, то формулы (г) определяют отображение f: {M (x, y)} → {M/ (x/, y/)} и f = g d, где d - симметрия относительно оси (Ох), а g - перенос, определяемые соответственно формулами (*), (**) в репере R. Следовательно, преобразование f, определяемое в репере R формулами (г), есть скользящая симметрия.
d, где d - симметрия относительно оси (Ох), а g - перенос, определяемые соответственно формулами (*), (**) в репере R. Следовательно, преобразование f, определяемое в репере R формулами (г), есть скользящая симметрия.
Из свойств осевой симметрии и переноса плоскости следует, что в скользящей симметрии f = gd:
-
прямая d инвариантна;
-
d1 || d
f (d1) || f (d) f (d1) || d; -
d1 d
f (d1)d; -
середина отрезка [M, f (M)] лежит на прямой d (M
d); -
скользящая симметрия не имеет инвариантных точек.
Теорема 1. Пусть R = (A, B, C) и R/ = (A/, B/, C/) - произвольные ортонормированные реперы плоскости σ. Тогда существует одно и только одно движение, которое репер R переводит в репер R/. При этом движении любая точка М с данными координатами в репере R переводит в точку М/ с теми же координатами в репере R/.
1) Докажем сначала, что существует движение, которое репер R переводит в репер R/. Построим отображение g: σ → σ следующим образом. Произвольной точке М с координатами х, у в репере R поставим в соответствие точку М/ с теми же координатами в репере R/. Ясно, что А (0, 0)R  A/ (0, 0)R/, B (1, 0)R
A/ (0, 0)R/, B (1, 0)R  B/ (1, 0)R/ и С (0, 1)R → C/ (0, 1)R/.
B/ (1, 0)R/ и С (0, 1)R → C/ (0, 1)R/.
Отображение g: σ → σ является взаимно однозначным отображением плоскости на себя, т. е. является преобразованием плоскости σ. Докажем, что g сохраняет расстояние. В самом деле, пусть М1 и М2 - произвольные точки плоскости, которые в репер R имеют координаты М1 (х1, у1)R и М2 (х2, у2)R. Тогда М1М2 = . Образы М 1 / и М 2 / точек М 1 и М 2 в репере R/ имеют те же координаты: М/1 (х1, у1)R/, M/2 (x2, y2)R/, поэтому
. Образы М 1 / и М 2 / точек М 1 и М 2 в репере R/ имеют те же координаты: М/1 (х1, у1)R/, M/2 (x2, y2)R/, поэтому
М/1М/2 = и, следовательно, М1М2 = М/1М/2. Таким образом, g - движение, которое переводит репер R в репер R/.
2) Докажем теперь, что g - единственное движение, которое переводит репер R в репер R/. Допустим, что это не так, т. е. существует другое движение f, такое, что R/ = f (R). Тогда на плоскости существует такая точка М, что образ М1 этой точки в движении g не совпадает с образом М2 той же точки в движении f. Так как А  А/ и А
А/ и А  А/, то АМ = А/ М1, АМ = А/ М2, поэтому А/ М1 = А/ М2 т.е. точка А/ равноудалена от концов отрезка М1М2. Точно так же можно доказать, что точки В/ и С/ равноудалены от концов отрезка М1М2. Таким образом, точки А/, В/ и С/ лежат на серединном перпендикуляре отрезка М1М2, т.е. на одной прямой, что противоречит определению репера.
А/, то АМ = А/ М1, АМ = А/ М2, поэтому А/ М1 = А/ М2 т.е. точка А/ равноудалена от концов отрезка М1М2. Точно так же можно доказать, что точки В/ и С/ равноудалены от концов отрезка М1М2. Таким образом, точки А/, В/ и С/ лежат на серединном перпендикуляре отрезка М1М2, т.е. на одной прямой, что противоречит определению репера.
Итак, g - единственное движение, которое репер R переводит в репер R/. При этом движении точка М (х, у)R переводит в точку М/ (х, у)R/. Что и требовалось доказать.
Пользуясь этой теоремой, выясним, в какие фигуры переходят в движении прямая, полуплоскость, отрезок, луч и угол.
10. Движение переводит прямую в прямую, а параллельные прямые - в параллельные прямые.
Выберем ортонормированный репер R и рассмотрим его образ R/ в данном движении. Тогда R/ также ортонормированный репер. Пусть прямая d в репере R определяется уравнением Ах + Ву + С = 0. Образ d / этой прямой (т.е. множество образов всех точек прямой d) в репере R/ определяется тем же уравнением, поэтому является прямой.
Рассмотрим теперь параллельные прямые d1 и d2 и их образы d/1 и d/2. Если предположить, что прямые d/1 и d/2 имеют хотя бы одну общую точку М/, то прообраз М этой точки лежит как на прямой d1, так и на прямой d2. Таким образом, прямые d1 и d2 имеют общую точку М; это противоречит условию.
20. Движение переводит полуплоскость с границей b в полуплоскость с границей b/, где b/ - образ прямой b.
Пусть α - данная полуплоскость с границей b, а α/ - образ полуплоскости α в движении g. Если прямая b в репере R имеет уравнение Ах + Ву + С = 0, то по теореме (Если в аффинной системе координат прямая d задана уравнением Ах + Ву + С = 0, то полуплоскости с границей d определяются неравенствами Ах + Ву + С > 0 и Ах + Ву + С < 0) полуплоскость α определяется неравенством
Ах + Ву + С > 0 (или Ах + Ву + С < 0). (1)
Множество α/ в репере R/, где R/ = g (R), определяется тем же неравенством (1). Отсюда следует, что α/ - полуплоскость с границей b/, где b/ = g (b).
Отношение λ, в котором точка С делит отрезок АВ называется простым отношением трех точек А, В, и С и обозначается так: λ = (АВ, С).
Докажем следующее важное свойство.
30. Движение сохраняет простое отношение трех точек прямой.
Пусть в репере R три произвольные точки одной прямой имеют координаты А (х1, у1), В (х2, у2), С (х, у).
Если λ = (АВ, С), то
 (2)
(2)
Если R/ - образ репера R, то образы А/, В/, С/ точек А, В, С в репере R/ имеют координаты А/ (х1, у1), В/ (х2, у2), С/ (х, у). Равенства (2) показывают, что точка С/ делит отрезок А/В/ в отношении λ, т.е. (А/В/, С/) = λ. Таким образом,
(АВ, С) = (А/В/, С/).
Точка С лежит между точками А и В тогда и только тогда, когда
(АВ, С) > 0, поэтому из свойства 30 следует утверждение.
40. Движение сохраняет отношение «лежать между».
Если (АВ, С) > 0, то точка С лежит на отрезке АВ, а если (АВ, С) < 0, то точка С лежит на прямой АВ, но вне отрезка АВ. Отсюда и из свойства 30 следует утверждение.
50. Движение переводит отрезок АВ в отрезок А/ В/, где А/ и В/ - образы точек А и В. При этом середина отрезка АВ переходит в середину отрезка А/В/.
60. Движение переводит луч в луч, а угол - в угол.
70. Движение переводит угол в равный ему угол.
Пусть  - данный угол,
- данный угол,  - его образ, причем О/, А/ и В/ - образы точек О, А и В. Если развернутый, то утверждение теоремы очевидно, поэтому рассмотрим случай, когда этот угол не развернутый, т.е. (О, А, В) - репер. Тогда (О/, А/, В/) также репер. Треугольники ОАВ и О/ А/ В/ равны по третьему признаку равенства треугольников (ОА = О/ А/, ОВ = О/ В/, АВ = А/В/), поэтому =.
- его образ, причем О/, А/ и В/ - образы точек О, А и В. Если развернутый, то утверждение теоремы очевидно, поэтому рассмотрим случай, когда этот угол не развернутый, т.е. (О, А, В) - репер. Тогда (О/, А/, В/) также репер. Треугольники ОАВ и О/ А/ В/ равны по третьему признаку равенства треугольников (ОА = О/ А/, ОВ = О/ В/, АВ = А/В/), поэтому =.
Отсюда и из свойств 10 как следствие получаем утверждение.
80. Движение переводит взаимно перпендикулярные прямые во взаимно перпендикулярные прямые.
Пусть О - некоторая точка плоскости, h - луч, исходящий из этой точки, а α - полуплоскость, границе которой принадлежит луч h. Тройка О, h, α называется флагом и обозначается так: (О, h, α) (рис. 10). Очевидно, при движении флаг переходит во флаг.
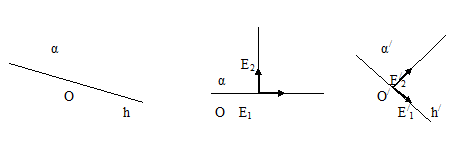
Рисунок 10 Рисунок 11
Теорема 2. Пусть (О, h, α) и (О/, h/, α/) - произвольные флаги. Тогда существует одно и только одно движение, которое флаг (О, h, α) переводит в флаг (О/, h/, α/).
Введем в рассмотрение ортонормированные реперы (О, Е1, Е2) и (О/, Е/1, Е/2) такие, что Е1h, Е2α, Е/1h/, Е/2α/ (рис. 11). Рассмотрим движение g, которое репер (О, Е1, Е2) переводит в репер (О/, Е/1, Е/2). Так как О/ = g (О),
Е/1 = g (E1), то h/ = g (h). Но Е/2 = g (Е2), поэтому α/ = g (α). Таким образом, движение g переводит флаг (О, h, α) в флаг (О/, h/, α/).
Пусть f - произвольное движение, которое переводит флаг (О, h, α) в флаг (О/, h/, α/). Так как h/ = f (h), то Е1 = f (E1). Далее, углы Е1ОЕ2 и Е/1О/Е/2 прямые, поэтому движение f луч ОЕ2 переводит в луч О/Е/2, а следовательно,
Е/2 = f (Е2). Таким образом, движение f переводит репер (О, Е1, Е2) в репер
(О/, Е/1, Е/2), поэтому f совпадает с g. Что и требовалось доказать.
1.3 Два вида движений. Аналитическое выражение движения
Будем говорить, что реперы R = (O, A, B) и R/ = (O/, A/, B/) одинаково ориентированы (противоположно ориентированы), если базисы  ,
,  и
и  ,
,  одинаково ориентированы (противоположно ориентированы). Таким образом, реперы R и R/ одинаково ориентированы, если R | R/ > 0, и противоположно ориентированы, если R | R/ < 0.
одинаково ориентированы (противоположно ориентированы). Таким образом, реперы R и R/ одинаково ориентированы, если R | R/ > 0, и противоположно ориентированы, если R | R/ < 0.
Здесь R | R/ = |(
|( ,).
,).
Говорят, что преобразование точек плоскости сохраняет ориентацию плоскости (меняет ориентацию плоскости), если любой репер и его образ одинаково ориентированы (противоположно ориентированы).
Теорема 1. Любое движение либо сохраняет, либо меняет ориентацию плоскости.
Пусть g - произвольное движение, R0 - некоторый ортонормированный репер, а R/0 - его образ, который также является ортонормированным репером. Возьмем произвольный репер R = (O, A, B) и рассмотрим его образ R/ = (O/, A/, B/). По основной теореме точки О, А, В в репере R0 имеют те же координаты, что и соответствующие точки О/, А/, В/ в репере R/0. Отсюда следует, что векторы  ,
,  в репере R0 имеют те же координаты, что и соответственно векторы
в репере R0 имеют те же координаты, что и соответственно векторы  ,
, в репере R/0, поэтому R0 | R = R/0 | R/ или R | R0 = R/ | R/0. Используя это равенство и свойство 20, получаем:
в репере R/0, поэтому R0 | R = R/0 | R/ или R | R0 = R/ | R/0. Используя это равенство и свойство 20, получаем:
R | R/ = (R | R0) (R0 | R/ ) = (R/ | R/0) (R0 | R/ ) = (R0 | R/ ) (R/ | R/0) = R0 | R/0.
Отсюда следует утверждение теоремы. Действительно, если
R0 | R/0 > 0, то R | R/ > 0, т.е. произвольный репер R и его образ R/ ориентированы одинаково, а если R0 | R/0 < 0, то R | R/ < 0, т.е. R и R/ ориентированы противоположно. Что и требовалось доказать.
Итак, доказано, что возможны два вида движений: движения, не меняющие ориентацию плоскости, и движения, меняющие ориентацию плоскости. В первом случае движение называется движением первого рода, а во втором случае - движением второго рода.
Пусть g - данное движение. Возьмем на плоскости ортонормированный репер R = (O, E1, E2), обозначим через (х, у) координаты произвольной точки М плоскости, а через (х/, у/) - координаты ее образа М/ в этом репере. Выразим х/, у/ через х, у, т.е. найдем аналитическое выражение движения g в репере R.
Для решения этой задачи рассмотрим образ R/ = (O/, E/1, E/2) репера R в движение g. Так как движение g дано, то мы предполагаем, что репер R/ задан, т.е. даны координаты точки О/ (х0, у0) в репере R и известен направленный угол
α = ( ,
, ).
).
По основной теореме точка М/ в репере R/ имеет координаты (х, у). Следовательно, наша задача сводится к обычной задаче преобразования прямоугольной системы координат: точка М/ в старом репере R имеет координаты (х/, у/), а в новом репере R/ - координаты (х, у). Выразим х/, у/ через х и у.
Рассмотрим два случая.
А. Движение g является движением первого рода. Тогда реперы R и R/ ориентированы одинаково, поэтому искомые формулы имеют вид:
х/ = х cos α - y sin α + x0,
(1) y/ = x sin α + y cos α + y0.
Б. Движение g является движением второго рода. Тогда реперы R и R/ ориентированы противоположно, поэтому искомые формулы имеют вид:
х/ = х cos α + y sin α + x0,
(2) y/ = x sin α - y cos α + y0.
Формулы (1) и (2) можно объединить в одной записи:
х/ = х cos α - εy sin α + x0,
(3)
y/ = x sin α + εy cos α + y0.
где ε = 1, если g - движение первого рода, и ε = - 1, если g - движение второго рода.
Матрица  называется ортогональной, если ее элементы удовлетворяют условиям:
называется ортогональной, если ее элементы удовлетворяют условиям:
а12 + а22 = 1, b12 + b22 = 1, a1b1 + a2b2 = 0. (4)
Докажем, что определитель ортогональной матрицы равен  . Для этого введем ортонормированный базис , и в этом базисе рассмотрим векторы
. Для этого введем ортонормированный базис , и в этом базисе рассмотрим векторы  (а1, а2) и
(а1, а2) и  (b1, b2). Условия (4) показывают, что векторы
(b1, b2). Условия (4) показывают, что векторы  и
и  образуют ортонормированный базис, поэтому по формулам
образуют ортонормированный базис, поэтому по формулам
 (*)
(*)
получаем: sin ( ,
,  ) = δ, где δ =
) = δ, где δ = . Если базис , правый, то
. Если базис , правый, то
( ,
,  ) =
) = , поэтому δ = 1, а если этот базис левый, то (, ) = -
, поэтому δ = 1, а если этот базис левый, то (, ) = -  , поэтому δ = - 1.
, поэтому δ = - 1.
Заметим, что в формулах (1) и (2) коэффициенты при х и у образуют ортогональные матрицы:

 ,
, 
 . (5)
. (5)
Ранее было доказано, что аналитическое выражение любого движения плоскости имеет вид (3), где матрица, образованная из коэффициентов при х и у, является ортогональной. Докажем обратное утверждение.
Теорема 2. Если аналитическое выражение отображения f в ортонормированном репере R = (O, E1, E2) имеет вид:
х/ = а1х + b1y + x0, y/ = a2x + b2y + y0, (6)
где - ортогональная матрица, то f - движение.
При этом, если δ = 1, то f - движение первого рода, а если δ = - 1, то f - движение второго рода. Здесь δ = .
Так как δ ≠ 0, то отображение f является преобразованием. Докажем, что f - движение. Пусть М1 (х1, у1), М2 (х2, у2) - две произвольные точки, а М/1 (х/1, у/1) и М/2 (х/2, у/2) - их образы. Используя формулы (6) и равенства (4), найдем: (х/2 - х/1)2 + (у/2 - у/1)2 = (х2 - х1)2 + (у2 - у1)2, или М/1М/22 = М1М22. Таким образом, f сохраняет расстояния, поэтому является движением.
При движении f репер R = (О, Е1, Е2) переходит в репер R/ = (O/, E/1, E/2), где О/ (х0, у0), Е/1 (а1 + х0, а2 + у0), E/2 (b1 + х0, b2 + у0), поэтому векторы  и
и  имеют координаты
имеют координаты  (а1, а2),
(а1, а2),  (b1, b2). Отсюда следует, что
(b1, b2). Отсюда следует, что
R | R/ = = δ. Если δ = 1, то реперы R и R/ ориентированы одинаково, поэтому f - движение первого рода, а если δ = - 1, то реперы R и R/ имеют противоположные ориентации, поэтому f - движение второго рода. Что и требовалось доказать.
Эта теорема часто используется для доказательства того, что то или иное отображение является движением. Рассмотрим примеры.
Пример 1. Пусть на ориентированной плоскости σ дана точка О и направленный угол α. Определим отображение g: σ → σ следующим образом: точке М, отличной от точки О, поставим в соответствие точку М/ так, чтобы
ОМ = ОМ/ и  МОМ/ = α, а точки О поставим в соответствие эту же точку О. Это отображение поворот (или вращение) плоскости вокруг точки О на угол α (см. 1.2, пример 3). Точка О - центр поворота, а величина α - угол поворота. Легко заметить, что поворот на угол π либо -π является центральной симметрией.
МОМ/ = α, а точки О поставим в соответствие эту же точку О. Это отображение поворот (или вращение) плоскости вокруг точки О на угол α (см. 1.2, пример 3). Точка О - центр поворота, а величина α - угол поворота. Легко заметить, что поворот на угол π либо -π является центральной симметрией.
Пользуясь предыдущей теоремой, докажем, что поворот является движением первого рода. Выберем на плоскости прямоугольную систему координат О, приняв за начало координат центр О поворота, и установим связь между координатами произвольной точки М (х, у), отличной от точки О и ее образа М/ (х/, у/). По определению поворота ( ,
,  ) = α, ОМ = ОМ/. По формулам (*) имеем:
) = α, ОМ = ОМ/. По формулам (*) имеем:
где ρ2 = ОМ 2 = ОМ/ 2 = х2 + у2 = х/ 2 + у/ 2. Отсюда получаем:
хх/ + уу/ = ρ2 cos α,
- yx/ + xy/ = ρ2 sin α.
Эту систему можно рассматривать как систему двух уравнений с двумя неизвестными х/, у/. Решая ее, находим:
х/ = х cos α - y sin α,
(7) y/ = x sin α + y cos α.
Заметим, что эти формулы пригодны и в том случае, когда точка М совпадает с точкой О.
Мы получили аналитическое выражение поворота вокруг начала координат. Так как матрица, образованная из коэффициентов при х и у, ортогональная (см. (5), левая матрица) и определитель этой матрицы равен + 1, то g - движение первого рода. При α = π или α = - π формулы (7) принимают вид:
х/ = - х, у/ = - у. (8)
Эти формулы представляют собой аналитическое выражение центральной симметрии с центром в начале координат.
Пример 2. На плоскости σ возьмем прямую d и каждой точке М σ поставим в соответствие точку М/, симметричную точке М относительно прямой d (рис.12). Напомним, что каждая точка прямой d симметрична самой себе относительно этой прямой. Мы получаем осевую симметрию или отражение от прямой d (см.1.3, пример 2). Прямая d - ось симметрии.
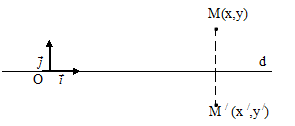
Рисунок 12
Докажем, что осевая симметрия является движением. Для этого выберем на плоскости прямоугольную систему координат О так, как показано на рисунке 12,и запишем аналитическое выражение осевой симметрии. Пусть М (х, у) - произвольная точка плоскости, а М/ (х/, у/) - ее образ. Так как точки М и М/ симметричны относительно оси абсцисс, то
х/ = х, у/ = - у. (9)
По теореме 2 осевая симметрия является движением второго рода.
1.4 Классификация движений плоскости
Точку плоскости назовем инвариантной (неподвижной) точкой преобразования, если она переходит в себя в этом преобразовании. Прямую назовем инвариантной (неподвижной) прямой преобразования, если любая ее точка переходит в точку этой же прямой.
В частности, прямая является инвариантной, если каждая ее точка инвариантна в данном преобразовании (такую прямую будем называть прямой инвариантных точек). Если, например, g - осевая симметрия, то ось этого преобразования и любая прямая, перпендикулярная к ней, являются инвариантными прямыми, причем ось симметрии - прямая инвариантных точек.
Лемма 1. Если движение g не имеет не одной инвариантной точки, то оно имеет хотя бы одну инвариантную прямую.
Пусть А - произвольная точка плоскости, А1 = g (А), А2 = g (А1). По условию леммы точка А не совпадает с точкой А1, а точка А1 - с точкой А2. Если точки А, А1 и А2 лежат на одной прямой, то эта прямая является инвариантной, поэтому рассмотрим случай, когда эти точки не лежат на одной прямой (рис. 13).
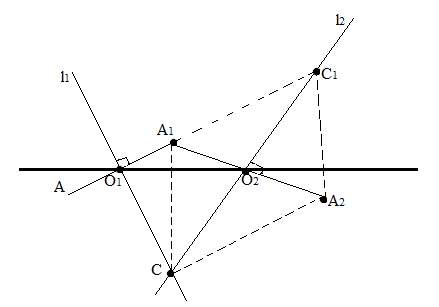
Рисунок 13
Рассмотрим середины О1 и О2 отрезков АА1 и А1А2 и докажем, что О1О2 - инвариантная прямая (рис. 13). Для этого проведем серединные перпендикуляры l1 и l2 отрезков АА1 и А1А2 и обозначим через С их точку пересечения. Очевидно, О2 = g (O1), поэтому l2 = g (l1) (свойство 8 из 1.2). Так как О1С = О2С, то точка C прямой l1 переходит либо в ту же точку С прямой l2, либо в точку C1, симметричную точке С относительно точки О2 (см. рис. 13). Первый случай не может иметь места, так как g не имеет неподвижных точек, поэтому С1 = g (С). Таким образом, прямая А1С переходит в параллельную ей прямую А2С1 (четырехугольник А1С А2С1 - параллелограмм).
Пусть m/ - образ прямой О1О2. Так как О1О2 А1С, то m/
А1С, то m/ А2С1 или m/
А2С1 или m/ А1С. Мы видим, что прямая m/ проходит через точку О2 и перпендикулярна прямой А1С, поэтому m/ совпадает с прямой О1О2.
А1С. Мы видим, что прямая m/ проходит через точку О2 и перпендикулярна прямой А1С, поэтому m/ совпадает с прямой О1О2.
Лемма 2. Если движение g луч h переводит в себя, то g либо тождественное преобразование, либо отражение от прямой p, содержащий луч h.
Обозначим через О начало луча h, а через λ и λ/ - две полуплоскости с общей границей, содержащей луч h. Возможны только два случая.
1) Движение g переводит флаг (О, h, λ) в флаг (О, h, λ). По теореме 1 пункта 1. 3 движение g - тождественное преобразование.
2) Движение g переводит флаг (О, h, λ) в флаг (О, h, λ/ ). По теореме 2 пункта 1. 3 движение g совпадает с осевой симметрией относительно прямой p.
Проведем классификацию движений в зависимости от наличия неподвижных точек и инвариантных прямых.
А. Классификация движений первого рода.
1) Движение имеет более чем одну неподвижную точку. Пусть А и В - две неподвижные точки движения g. Тогда луч АВ переводит в себя, поэтому по лемме 2 g либо тождественное преобразование, либо осевая симметрия. Но осевая симметрия является движением второго рода, поэтому g - тождественное преобразование.
2) Движение g имеет только одну неподвижную точку. Выберем ортонормированный репер (О, Е1, Е2) так, чтобы точка О была неподвижной точкой, и запишем аналитическое выражение этого движения. В данном случае формулы (1) из 1.3 имеют вид:
х/ = х cos α - y sin α, y/ = x sin α + y cos α. (1)
Так как g не является тождественным преобразованием, то α ≠ 0. Формулы (1) в точности совпадают с формулами (7) пункта 1. 4, поэтому g - вращение вокруг точки О на угол α. При α = π либо α = -π преобразование g - центральная симметрия с центром О. Заметим, что если - π < α < π, то g не имеет инвариантных прямых, а в случае α = π либо α = -π - бесконечное множество инвариантных прямых; инвариантными будут те и только те прямые, которые проходят через точку О.
3) Движение g не имеет неподвижных точек. Согласно лемме 1, существует хоты бы одна инвариантная прямая l.
Пусть О - некоторая точка этой прямой, О1 = g (О), О2 = g (О1). Точки О, О1 и О2 лежат на прямой l и попарно различны, так как g не имеет неподвижных точек (если предположить, что точки О и О2 совпадают, тогда середина отрезка ОО1 была бы неподвижной точкой, что невозможно).
Выберем ортонормированный репер (О, Е1, Е2) так, чтобы Е1 l. Пусть в этом репере точка О1 имеет координаты О1 (а, 0). Так как ОО1 = О1О2, то О2 имеет координаты (2а, 0).
Допустим, что аналитическое выражение движения g в репере (О, Е1, Е2) имеет вид (1) § 1. 3. Так как О = g (О1), О2 = g (О1), то х0 = а, у0 = 0, cos α = = 1, sin α = 0, поэтому формулы (1) принимают вид:
х/ = х + а, у/ = у. (2)
Отсюда следует, что g - параллельный перенос на ненулевой вектор р (а, 0) (см. 1. 3, пример 1). Действительно, если М (х, у) - произвольная точка, а М/ (х/, у/) - ее образ, то из формул (2) получаем:  =
= . Любая прямая, параллельная вектору , является инвариантной прямой параллельного переноса. Других инвариантных прямых нет.
. Любая прямая, параллельная вектору , является инвариантной прямой параллельного переноса. Других инвариантных прямых нет.
Б. Классификация движений второго рода. Из формул (2) 1.3 получаем следующие уравнения для нахождения координат неподвижных точек движения второго рода:
(cos α - 1) x + sin αy + x0 = 0,
sin αx - (cos α + 1) y + y0 = 0.
Определитель этой системы при любом α равен нулю, и не все коэффициенты при х и у равны нулю, поэтому любое движение второго рода либо имеет прямую инвариантных точек, либо не имеет ни одной инвариантной точки. Рассмотрим каждый из этих случаев в отдельности.
1) Движение g имеет прямую инвариантных точек. Пусть h - какой-нибудь луч этой прямой. Так как h = g(h), то по лемме 2 g - либо тождественное преобразование, либо осевая симметрия. Но тождественное преобразование является движением первого рода, поэтому g - осевая симметрия.
2) Движение g не имеет инвариантных точек. Этот случай аналогичен случаю параллельного переноса (см. п. А, случай 3). Выберем ортонормированный репер (О, Е1, Е2) так, чтобы точки О и Е1 лежали на инвариантной прямой l. Пусть О1 = g (О), О2 = g (О1). Если точка О1 имеет координаты (а, 0), то точка О2 имеет координаты (2а, 0). Предположим, что аналитическое выражение движения g в репере (О, Е1, Е2) имеет вид (2) § 1. 3. Из условий О  О1, О1
О1, О1 О2 получаем : х0 = а, у0 = 0, cos α = 1, sin α = 0, поэтому формулы (2) из 1. 3 принимают вид:
О2 получаем : х0 = а, у0 = 0, cos α = 1, sin α = 0, поэтому формулы (2) из 1. 3 принимают вид:
х/ = х + а, у/ = - у. (3)
Докажем, что g = s f, где f - параллельный перенос на ненулевой вектор (а, 0), а s - отражение от прямой l. В самом деле, преобразования s и f в репере (О, Е1, Е2) определяются формулами:
поэтому отображение sf определяется формулами (3), т. е. совпадает с g. В этом случае движение g называется скользящей симметрией. Ясно, что скользящая симметрия не имеет инвариантных точек и имеет только одну инвариантную прямую.
Итак, существует четыре типа движений, которые приведены в таблице 1
Таблица 1
Название движения
Инвариантные точки
Инвариантные прямые
І. Движения первого рода
1.Поворот на угол α
а) Поворот на угол α ≠ 0 и α ≠ π
Центр поворота
Нет
б) Тождественное преобразование (α = 0)
Любая точка плоскости
Любая прямая плоскости
в) Центральная симметрия
(α = π)
Центр симметрии
Любая прямая, проходящая через центр симметрии
2. Параллельный перенос на вектор р
а) Параллельный перенос на вектор р ≠ 0
Нет
Любая прямая, параллельная вектору р
б) Тождественное преобразование (р = 0)
Любая точка плоскости
Любая прямая плоскости
II. Движения второго рода
3. Осевая симметрия
Все точки оси
Ось симметрии и любая прямая, перпендикулярная к ней
4. Скользящая симметрия
Нет
Одна прямая
Таким образом, мы рассмотрели теоретические основы темы «Движения плоскости» и убедились в том, насколько эта тема многогранна и интересна. В данной главе мы рассмотрели: понятие отображение и преобразование множеств, понятие «движения плоскости», примеры движений плоскости, виды движений плоскости, движение I рода, движение II рода, аналитическое выражение движения, а также рассмотрели классификацию движений плоскости.
1 Разработка комплекса задач, решаемых методом движений на основе анализа учебных пособий федерального комплекта
2.1 Анализ учебных пособий федерального комплекта по геометрии с точки зрения содержательного компонента темы «Движения плоскости»
Анализ учебника Атанасяна Л. С. и др. «Геометрия 7 - 9» [6].
Данная тема изучается в главе 13. На ее изучение отводится 9 уроков. Еще до изучения темы «Движения плоскости» учащиеся знакомятся с понятиями осевая и центральная симметрии в главе 5 §3 п.47 «Осевая и центральная симметрии». В этом пункте рассматриваются такие понятия как две симметричные точки относительно прямой, две симметричные точки относительно точки, фигура симметричная относительно прямой, фигура симметричная относительно точки; приводятся примеры фигур, обладающих осевой симметрией (равнобедренный треугольник имеет одну ось симметрии, равносторонний - три оси симметрии, квадрат - 4, окружность - бесконечно много), фигуры, у которых нет ни одной оси симметрии (параллелограмм, отличный от прямоугольника, разносторонний треугольник). Все это плавно подводит нас к более углубленному изучению движений плоскости в 9 классе.
Авторы начинают главу с рассмотрения понятия отображения плоскости на себя, приводит пример такого отображения (осевая симметрия, с которой школьники познакомились в 8 классе) и дает очень важное свойство симметрии - это отображение плоскости на себя, которое сохраняет расстояния между точками. Следовательно, дается определение движение плоскости - это отображение плоскости на себя, сохраняющее расстояние. Рассматривается теорема - при движении отрезок отображается на отрезок - и следствие - при движении треугольник отображается на равный ему треугольник.
Для того чтобы дать определение наложения, автор напоминает учащимся, что они уже сталкивались с этим понятием через равенство фигур (фигура Ф равна фигуре Ф1, если фигуру Ф можно совместить наложением с фигурой Ф1), т. е. наложение - это отображение плоскости на себя. Но не всякое отображение плоскости на себя называется наложением, поэтому автор дает ссылку на приложение 1, которое находится в конце учебника ([6] стр. 344 учебника), в ней рассказывается об аксиомах геометрии (аксиомы данной темы 7 - 13).
Со второго параграфа начинается уже новые понятия для учащихся - это параллельный перенос и поворот. Вводятся определения параллельного переноса и поворота, а также рассматриваются два утверждения с доказательствами (параллельный перенос является движением, и поворот является движением).
В конце главы даны задачи на закрепление нового материала, вопросы для повторения, дополнительные задачи. В основном даны задачи на доказательство и на построение, а также одна задача на нахождение.
Анализ учебника Погорелова А. В. 7 - 9 класс [13].
Данный учебник предназначен для преподавания геометрии в 7 - 9 классах общеобразовательной школы.
Данная тема изучается в § 9. На ее изучение отводится также 9 уроков. Автор рассматривает такие вопросы как существование и единственность параллельного переноса, сонаправленность полупрямых, равенство фигур.
Содержание параграфа начинается с рассмотрения преобразования фигур, т. е. новую фигуру можно получить с помощью какого - либо смещения, и говорят, что эта фигура получена преобразованием данной. И тут же автор дает определение движения: преобразование одной фигуры в другую называется движением, если оно сохраняет расстояние между точками, т. е. переводит любые две точки X и Y одной фигуры в точки Х /, Y / другой фигуры так, что XY = X / Y /. Он вводит понятие преобразования, обратное данному.
Следующий пункт параграфа называется «Свойства движения». Эти свойства автор рассматривает в теореме: Точки, лежащие на прямой, при движении переходят в точки, лежащие на прямой, и сохраняется порядок их взаимного расположения. Данная теорема идет с доказательством.
И в двух следствиях из теоремы: 1) При движении прямые переходят в прямые, полупрямые - в полупрямые, отрезки - в отрезки. Это следствие не доказывается, но доказывается второе следствие: 2) При движении сохраняются углы между полупрямыми.
Далее автор рассматривает симметрию относительно точки. В этом пункте он дает определения симметричной точки, симметричной фигуры и теорему: Преобразование симметрии относительно точки является движением - с доказательством.
Следующий пункт - симметрия относительно прямой. Также как и в предыдущем пункте даны определения и теорема с доказательством.
Далее рассматриваются такие виды движения как поворот и параллельный перенос с свойствами. В отдельные пункты выделяются вопросы о существовании и единственности параллельного переноса, сонаправленность прямых, равенство фигур.
В конце параграфа даны контрольные вопросы и задачи на доказательство, построение и нахождение.
Анализ учебника Александрова А. Д. 8 - 9 класс [1].
Данный учебник предназначен для преподавания геометрии в 8 - 9 классах, ориентирован на учащихся школ и классов с углубленным изучением математики.
Данная тема рассматривается в главе 5. Глава разбита на параграфы, а параграфы в свою очередь на пункты. В конце каждого параграфа есть вопросы и задачи к нему.
Автор рассматривает такие вопросы как:
1. Движения и равенство фигур
-
преобразование фигур;
-
движение фигур;
-
свойства движений;
-
равенство фигур.
2. Виды движений
-
перенос;
-
метод параллельного переноса;
-
отражение в прямой (осевая симметрия);
-
метод симметрии;
-
поворот;
-
метод поворота;
-
центральная симметрия.
3. Классификация движений
-
теоремы о задании движений;
-
замечание о распространении движения;
-
теорема Шаля;
-
неподвижные точки движений;
-
два рода движений. Ориентация.
4. Симметрия фигур
-
симметрия ограниченных фигур;
-
симметрия неограниченных фигур;
-
о симметрии;
-
группа симметрии фигуры;
-
группы преобразований фигур.
Из анализа учебника Александрова А. Д. [1] видно, насколько углубленно изучается данная тема. Задач на построение, доказательство, нахождение здесь очень много. Если в двух предыдущих учебниках данная тема изучается 9 часов, то здесь - 15. Основной упор идет на рассмотрение таких вопросов как: Отображение плоскости на себя, понятие движения. Ориентация плоскости. Параллельный перенос, центральная и осевая симметрии, поворот вокруг точки. Задание движений в координатах (формулы параллельного переноса, центральной симметрии, осевой симметрии относительно осей координат, поворота вокруг начала координат). Композиция движений. Теорема Шаля. Решение задач на построение и доказательство при помощи движений.
Анализ учебника Шарыгина И. Ф. 7 - 9 класс [17].
Данный учебник предназначен для преподавания геометрии в 7 - 9 классах общеобразовательных школ.
Данная тема рассматривается в параграфе 12 9 класса, однако понятия центральной и осевой симметрий вводятся во 2 параграфе 7 класса. Особенностью изложения материала является то, что все виды движений вводятся как композиция осевых симметрий, при этом центральная симметрия определена как поворот на 180.
Автор рассматривает такие вопросы как движение плоскости, композиция движений, способы задания движений. Выделены виды движений плоскости: параллельный перенос, поворот, скользящая симметрия. Данный учебник является единственным учебником федерального комплекта, в котором вводится понятие скользящей симметрии, хотя нет задачного материала, позволяющего закрепить введенное понятие.
Задачный материал по теме «Движения плоскости» включает достаточно большое количество упражнений, направленных на отработку умений применять метод движений.
Рассмотрим сводную таблицу анализа задачного материала проанализированных учебников. Ключевым аспектом данного анализа был поставлен вопрос отработки умений применять метод движений при решении задач. Умение применять метод движений является интегративным умением, состоящим из комплекса частных умений по каждому виду движения, следовательно, логично разбить этот комплекс на составляющие и анализировать наличие задач согласно каждой выделенной компоненте.
Таблица 2-Анализ содержания учебников с точки зрения наличия задач на применение метода движений1
Ученики должны уметь:
Задачи, ориентированные на формирование данных умений Атанасян Л.С.
Задачи, ориентированные на формирование данных умений Погорелов А.В.
Задачи, ориентированные на формирование данных умений Шарыгин И.Ф.
Центральная симметрия ZO
изображать центрально-симметричные фигуры
905, 1159, 1160, 1161
§9 - 3, 10, 11
§2.1 - 25, 26, 27
определять, является ли данная фигура центрально-симметричной
422, 423, 442, 1157
§9 - 7
§2.1 - 28
определять взаимное расположение двух центрально-симметричных фигур
644, 1149
§9 - 11, 12
-
находить координаты образов точек, если известны координаты их прообразов, и наоборот
-
-
§2.1 - 30
находить координаты центра симметрии, если известны координаты двух симметричных точек
-
-
§2.1 - 31
определять центр(ы) симметрии данной фигуры
443, 444, 1177
§9 - 8
§2.1 - 32
изображать заданную фигуру, имеющую центр симметрии
1177
§9 - 6
-
доказывать, что данная фигура является центрально-симметричной
905, 1181
§9 - 9
-
записывать уравнения образа прямой, при симметрии относительно данной точки
-
-
-
Параллельный перенос Тū
строить образ фигуры при Тū
1162, 1163, 1165
27
-
определять направление вектора переноса, чтобы выполнялись заданные условия
1164, 1178, 1182
§9 - 29, 30, 31
§12.2 - 1
представлять Тū как ZB○ZA и наоборот
-
-
-
определять положение двух равных фигур, чтоб можно было задать Тū
1178
-
§12.2 - 3
находить координаты образов точек при Тū, если известны координаты их прообразов, и наоборот
-
§9 - 28
§12.2 - 2
Осевая симметрия Sl
Определять ось(и) симметрии заданной фигуры
416, 417, 418, 419, 441
§9 - 15, 16, 19, 20, 21, 22, 23
§2.2 - 9
изображать заданную фигуру, имеющую ось (оси) симметрии
420, 421, 1158
§9 - 12, 13, 14
§2.2 - 7, 11
На доказательство равенства фигур
886, 1148, 1175, 1176
§9 - 17, 18
§2.2 - 8, 9, 10
§12.2 - 5
На доказательство перпендикулярности прямых
828
§9 - 24
-
Поворот вокруг точки RОφ.
На построение
1170, 1171, 1180
§9 - 25, 26
§12.2 - 8
На доказательство равенства фигур
1168, 1169
-
§12.2 - 7
строить образы фигуры при ROφ
1166, 1167
§9 - 25, 26
-
находить ROφ, при котором одна фигура перейдет в другую
1183
-
§12.2 - 5, 6
находить координаты точек при ROφ
-
-
§12.2 - 4
Скользящая симметрия 
строить образ фигуры при
-
-
-
определять направление вектора переноса и оси симметрии, чтобы выполнялись заданные условия
-
-
-
определять положение двух равных фигур, чтоб можно было задать
-
-
-
находить координаты образов точек при , если известны координаты их прообразов, и наоборот
-
-
-
2.2 Применение метода движений при решении задач
Рассмотрим решение задач по теме «Движения плоскости».
Задача 1. Докажите, что два параллелограмма равны, если смежные стороны и угол между ними одного параллелограмма соответственно равны смежным сторонам и углу между ними другого параллелограмма.
Анализ. Речь идет о двух параллелограммах, у которых смежные стороны и углы между ними равны, т. е. АВСД и А1В1С1Д1 - параллелограммы, АВ = А1В1, АД= = А1Д1, А = А1.
Требуется доказать, что эти два параллелограмма равны, т. е. АВСД = =А1В1С1Д1.
Поиск решения.
В параллелограмме противолежащие стороны и углы равны.
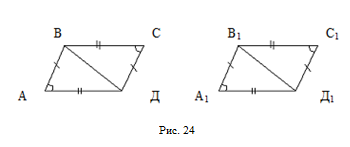
Рисунок 14
Если провести в этих параллелограммах диагонали ВД и В1Д1, то образуются треугольники:  АВД, СДВ, А1В1Д1, С1Д1В1. АВД = СДВ по двум сторонам и углу между ними, т. е. АВ = СД, АД = СВ, А = С. А1В1Д1 = С1Д1В1 по двум сторонам и углу между ними, т. е. А1В1 = С1Д1, А1Д1 = С1В1, А1 = С1.
АВД, СДВ, А1В1Д1, С1Д1В1. АВД = СДВ по двум сторонам и углу между ними, т. е. АВ = СД, АД = СВ, А = С. А1В1Д1 = С1Д1В1 по двум сторонам и углу между ними, т. е. А1В1 = С1Д1, А1Д1 = С1В1, А1 = С1.
Треугольники АВД и А1В1Д1, СДВ и С1Д1В1 тоже равны, т. к. АВ = А1В1, АД = А1Д1, А = А1 по условию задачи, аналогично для треугольников СДВ и С1Д1В1. Теперь можем доказать, что параллелограммы АВСД и А1В1С1Д1.
Решение:
Дано: АВСД и А1В1С1Д1 - параллелограммы,
АВ = А1В1, АД = А1Д1, А = А1.
Доказать: АВСД = А1В1С1Д1.
В параллелограмме противоположные стороны и углы равны. АВД = СДВ по двум сторонам и углу между ними (АВ = СД, АД = СВ, А = С).
А1В1Д1 = С1Д1В1 по двум сторонам и углу между ними (А1В1 = С1Д1, А1Д1 = С1В1, А1 = С1).
АВД = А1В1Д1 по двум сторонам и углу между ними (АВ = А1В1, АД = А1Д1, А = А1 по условию) СДВ = С1Д1В1.
АВСД = АВД + СДВ = А1В1Д1 + С1Д1В1 = А1В1С1Д1, что и требовалось доказать.
Задача 2. В четырехугольнике ABCD (рис. 25) AB =  , BC = 3,
, BC = 3,
CD = 2, BAD = CDA = 60 0. Найти угла АВС и ВСD.
Анализ: Речь идет о четырехугольнике АВСД, в котором AB = , BC = =3, CD = 2,BAD = CDA = 60 0. Надо найти углы АВС и ВСД.
Поиск решения: Для этого нужно рассмотреть параллельный перенос, в результате чего получим равнобедренную трапецию и найдем одну из сторон треугольника, а затем используя теорему косинусов найдем искомые углы.
Решение: Рассмотрим параллельный перенос на вектор  :
:  . Получим равнобедренную трапецию ABED, у которой AB = =ED = , а ABE =120°. Тогда CE = CD - ED = . В треугольнике BCE имеем 9 = x2 + 3 - 2xсos60° (по теореме косинусов), где BE = x. Отсюда
. Получим равнобедренную трапецию ABED, у которой AB = =ED = , а ABE =120°. Тогда CE = CD - ED = . В треугольнике BCE имеем 9 = x2 + 3 - 2xсos60° (по теореме косинусов), где BE = x. Отсюда
x2 - x - 6 = 0 и x = 2. Замечая, что BE2 = BC2 + CE2, получим BCD = =90°, а CBE = 30°. Тогда ABC = 120° + 30° = 150°.
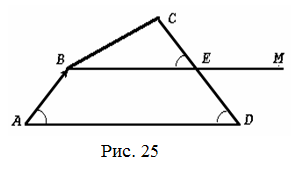
Рисунок 15
Задача 3. Пусть A1, B1, C1 - середины сторон треугольника ABC (рис.16), O1, О2, O3 - центры окружностей, вписанных в треугольники AC1B1, C1BA1, СВА1. Найти углы треугольника O1O2O3, если AB = 4, AC = 4, BAC = =30°.
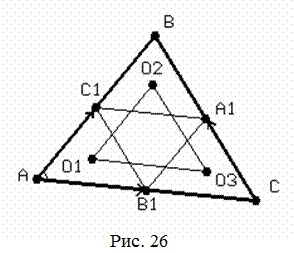
Рисунок 16
Анализ: Речь идет о треугольнике, у которого точки A1, B2, C3 - середины его сторон, а O1, О2, O3 - центры окружностей, вписанных в треугольники AC1B1, C1BA1, СВА1 и AB = 4, AC = 4, BAC = 30°. Надо найти углы треугольника O1O2O3.
Поиск решения: Используя теорему косинусов, найдем одну из сторон треугольника и получим равнобедренный треугольник. Рассмотрим параллельный перенос, получим О1О3 АС, О1О2 АВ, О2О3 ВС и тогда найдем искомые углы.
Решение: Сначала по теореме косинусов найдем сторону BC треугольника ABC: BC=4.
Следовательно, треугольник ABC будет равнобедренным и BCA=30°. Рассмотрим параллельный перенос на вектор . Так как
. Так как  AB1, B1C, C1A1, то
AB1, B1C, C1A1, то  отображает треугольник AB1C1 в треугольник B1CA1. Тогда O1O3. Отсюда следует, что O1O3||AC. Аналогично рассмотрим параллельный перенос на вектор
отображает треугольник AB1C1 в треугольник B1CA1. Тогда O1O3. Отсюда следует, что O1O3||AC. Аналогично рассмотрим параллельный перенос на вектор и параллельный перенос на вектор
и параллельный перенос на вектор  .
.
 O1O2 O1O2||AB,
O1O2 O1O2||AB,  O3O2 O2O3||BC.
O3O2 O2O3||BC.
Тогда O2O1O3=BAC=30° , O1O3O2 =BCA = 30°, а O3O2O1=180°- -2×30°=120°.
Задача 4. Прямая, проходящая через середины сторон AB и CD четырехугольника ABCD, не являющего трапецией, образует со сторонами AD и CD равные углы. Доказать, что AD = CB.
Анализ: В данной задаче речь идет о четырехугольнике, не являющимся трапецией, в котором есть равные углы. Нам надо доказать равенство сторон четырехугольника.
Поиск решения: Для этого рассмотрим параллельный перенос и покажем равенство углов. Затем рассмотрим центральную симметрию относительно точки в результате чего получим равнобедренный треугольник, а следовательно докажем равенство указанных сторон (рис. 17).
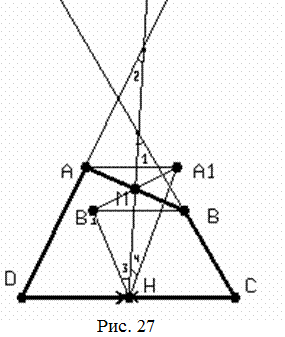
Рисунок 17
Решение: Пусть M и H - середины сторон AB и CD (рис.17). Рассмотрим сначала параллельный перенос на вектор  и параллельный перенос на вектор
и параллельный перенос на вектор  .
.  : D H, A A1 AD||A1H, AD = A1H;
: D H, A A1 AD||A1H, AD = A1H;  : C H, BB1 BC ||B1H, BC=B1H. Так как по условию 1=2, а 1 =3 и 2=4 как накрест лежащие углы, то 3=4. Затем рассмотрим центральную симметрию относительно точки M. Так как ZМ : AB, то луч AA1 отобразится в луч BB1 , так как AA1||BB1||DC. ZМ: A1B1, так как AA1 = DH = HC = BB1. В треугольнике A1B1H медиана MH является биссектрисой. Следовательно, треугольник A1B1H равнобедренный, т. е. A1H=B1H. Тогда и AB = CB.
: C H, BB1 BC ||B1H, BC=B1H. Так как по условию 1=2, а 1 =3 и 2=4 как накрест лежащие углы, то 3=4. Затем рассмотрим центральную симметрию относительно точки M. Так как ZМ : AB, то луч AA1 отобразится в луч BB1 , так как AA1||BB1||DC. ZМ: A1B1, так как AA1 = DH = HC = BB1. В треугольнике A1B1H медиана MH является биссектрисой. Следовательно, треугольник A1B1H равнобедренный, т. е. A1H=B1H. Тогда и AB = CB.
Задача 5. Даны две окружности b1(O1, r) и b2 (O2, r), пересекающиеся в точках M и H (рис.18). Прямая i, параллельная прямой O1O2, пересекает окружность b1 в точках A и B , а окружность b2 в точках C и D . Доказать, что величина угла AMC не зависит от положения прямой i, если лучи AB и CD сонаправлены и прямая i пересекает отрезок MH.
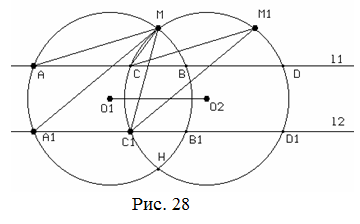
Рисунок 18
Анализ: Речь идет о двух окружностях, которые пересекаются в двух точках и прямой, которая параллельна расстоянию между центрами данных окружностей, а также эта прямая пересекает эти окружности в точках. Нам нужно доказать, что величина угла не зависит от положения этой прямой.
Поиск решения: Для доказательства воспользуемся параллельным переносом на вектор и покажем равенство углов, следовательно, докажем утверждение.
Решение: Пусть прямая i1 также удовлетворяет условиям задачи. Докажем, что AMC=A1MC1. Так как AMC=AMA1+A1MC, а
A1MC1=A1MC+CMC1, то надо доказать, что AMА1 =СMC1 . Рассмотрим параллельный перенос на вектор  .
.  : b1(O1,r)b2(O2,r). Тогда : MM1, AC, A1C1. Значит : AMA1CM1C1. Следовательно, AMA1=CM1C1. Но CM1C1=CMC1 как вписанные углы, опирающиеся на одну и ту же дугу CC1. Тогда AMA1=CMC1=AMC=
: b1(O1,r)b2(O2,r). Тогда : MM1, AC, A1C1. Значит : AMA1CM1C1. Следовательно, AMA1=CM1C1. Но CM1C1=CMC1 как вписанные углы, опирающиеся на одну и ту же дугу CC1. Тогда AMA1=CMC1=AMC=
=A1MC1.
Задача 6. Доказать, что точки, симметричные ортоцентру треугольника ABC относительно прямых AB, AC, BC, принадлежат описанной около треугольника ABC окружности.
Анализ: Речь идет о треугольнике, который вписан в окружность. Нужно доказать, что точки, симметричные ортоцентру треугольника относительно прямых принадлежат описанной около треугольника окружности.
Поиск решения: Рассмотрим осевую симметрию относительно прямой - покажем равенство углов, а следовательно докажем что одна из точек принадлежит окружности. Рассуждая аналогично, докажем и принадлежность других точек.
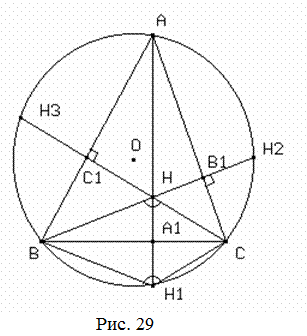
Рисунок 19
Решение: Пусть окружность b(O,r) описана около треугольника ABC, а H - его ортоцентр, т. е. H - точка пересечения высот треугольника ABC (рис.19). Рассмотрим осевую симметрию относительно прямой BC. SBC : BB, CC, HH1. Значит SBC: CHCH1, BHBH1, СHBCH1B. Следовательно,
СHB =СH1B. Так как в четырехугольнике AC1HB1:AC1H=AB1H=90°, то BAC+С1HB1=180°. Тогда в четырехугольнике ABH1C имеем
BAC+BH1C=BAC+BHC+BAC+C1HB1=180°, т. е. точка H1 принадлежит окружности b(O,r). Аналогично, рассматривая SAB и SAC, получим, что точки H2 и H3 принадлежат окружности b(O,r).
Задача 7. Точки C1 и С2 являются образами вершины С треугольника ABC при симметрии относительно прямых. Содержащих биссектрисы углов BAC и ABC (рис. 20).Доказать, что середина отрезка C1C2 есть точка касания вписанной в треугольник окружности и сторон AB.
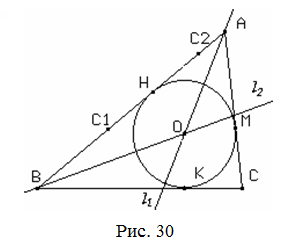
Рисунок 20
Анализ: Речь идет о треугольнике, в который вписана окружность и даны точки, которые являются образами одной из вершины треугольника, а также даны биссектрисы двух углов. Нужно доказать, что середина отрезка между образами точек вершины есть точка касания вписанной в треугольник окружности.
Поиск решения: Рассмотрим осевую симметрию относительно первой прямой, следовательно докажем равенство отрезков. Аналогично рассматривая осевую симметрию относительно второй прямой, получим равенство других отрезков. Затем, используя свойство касательных, докажем утверждение.
Решение: Пусть i1 и i2 - прямые, содержащие биссектрисы углов BAC и ABC, а H, K, M - точки касания вписанной окружности b(O,r) со сторонами AB, BC, AC. Рассмотрим осевую симметрию относительно прямой i1. Si1 : ACAB, CC1. Следовательно, C1AB. Так как Oi1, то i1 - ось симметрии окружности b. Тогда Si1: MH. Так как Si1 : CC1, MH, то Si1 : CMC1H. Следовательно, CM = C1H. Аналогично, рассматривая осевую симметрию относительно прямой i2, получим CK = C2H. По свойству касательных, проведенных из внешней точки C к окружности b, имеем CM=CK. Тогда
C1 H=C2H, причем точки C1, C2, H принадлежат прямой AB. Следовательно, H - середина отрезка С1С2.
Задача 8. Дан равнобедренный треугольник ABC, в котором AB = BC,
ABC = 30°. На стороне BC взята точка D так, что бы AC: BD = : 1. Найти угол DAC (рис. 21).
: 1. Найти угол DAC (рис. 21).
Анализ: Речь идет о равнобедренном треугольнике, в котором соответственно две стороны равны, а один из углов равен 300 и на одной из сторон взята точка, которая дает некоторое соотношение. Нам нужно найти угол.
Поиск решения: Рассматривая осевую симметрию получим подобие двух треугольников, следовательно найдем искомый угол.
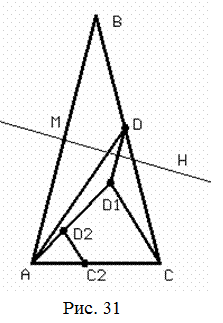
Рисунок 21
Решение: Рассмотрим осевую симметрию относительно серединного перпендикуляра MH к стороне AB. SMH: BA, DD1, MM. Значит SMH: BDAD1, MBDMAD1. Следовательно, BD=AD1, DD1||AB, MAD1=
=MBD=30°. Так как BAC=BCA=75°, то D1AC=45°. По условию AC:BD=:1. Тогда AC:AD1=:1. На прямых AC и AD1 построим точки C2 и D2 такие, что AC2=, AD2=1. Тогда в треугольнике AC2D2 имеем D2C2=AC2+AD2-2AC2×AD2сos45° =1. Отсюда D2C2=1, т. е. треугольник AD2C2 является равнобедренным, а это значит, чтоAC2D2=45°, AD2C2=90°. Так как треугольники ACD1 и AC2D2 подобны, (D1AC - общий, AC:AD1=AC2:AD2=:1), то ACD1=45°, AD1C=90°. Так как DD1||AB, D1DC=ABC=30°,то DCD1=BCA-D1CA=75°-45°=30°. Следовательно, в равнобедренном треугольнике CD1D: CD1D = 120°. Тогда AD1D=360° - (90° +120°) = 150°. Так как AD1=D1C=DD1, то в равнобедренном треугольнике AD1D:D1AD=(180°-150°):2=15°.ПолучимDAC=D1AC + D1AD=45°+15°=60°.
Задача 9. Даны две окружности b1(O1,r) и b2(O2,r), каждая из которых проходит через центр другой. Через точку А пересечения окружностей проведена прямая, пересекающая окружности в точках M и H. Найти угол между касательными, проведенными к окружностям в точках M и H (рис. 22).
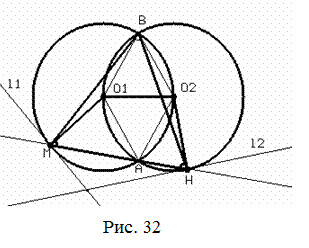
Рисунок 22
Анализ: Речь идет о двух окружностях, каждая из которых проходит через центр другой. Через точку пересечения окружностей проведена прямая, которая пересекает данные окружности в точках. Нужно найти угол между касательными, проведенными к окружности.
Поиск решения: Воспользуемся поворотом вокруг точки и найдем искомый угол.
Решение: Пусть i1 - касательная окружности b1 в точке H, а i2 - касательная к окружности b2 в точке М. В треугольнике O1BO2 имеем O1O2=O1B=O2B. Аналогично O1O2=O1A=O2A в треугольнике O1AO2. Тогда
BO1A=BO2A=120°. Отсюда следует, что BO2A=BO1A=120°. В треугольнике MBH получим BMA=BHA=60°. Тогда MBH=60°. Рассмотрим поворот вокруг точки В на угол 600. RВ60°: O1O2, MH. Значит RВ60°: O1MO2H. Тогда RВ60°: i1i2, так как по свойству касательной i1^ O1M, i2 ^O2H. Следовательно, угол между прямыми i1 и i2 равен 60°.
Задача 10. На катетах CA и CB равнобедренного прямоугольного треугольника ABC выбраны точки D и E так, что CD = CE (рис. 23). Прямые, проведенные через точки D и C перпендикулярно к AE, пресекают гипотенузу AB соответственно в точках К и H. Доказать, что KH = HB.
Анализ: Речь идет о равнобедренном прямоугольном треугольнике, в котором прямые, проведенные через точки этого прямоугольного треугольника перпендикулярны одной из сторон и пересекают гипотенузу в точках. Нужно доказать равенство двух отрезков.
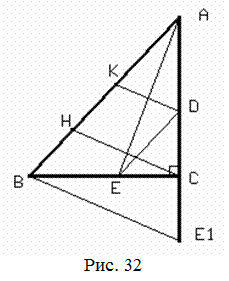
Рисунок 23
Поиск решения: Воспользуемся поворотом вокруг точки, а затем теоремой Фалеса, следовательно докажем наше равенство.
Решение: Рассмотрим поворот вокруг точки C на 90°. RС 90°: AB, DE, EE1, CC. Значит RС 90°: AEBE1, CECE1. Следовательно, AE^BE1, CE = =CE1. Так как CD=CE, то CD=CE1. По условию DK^AE и CH^AE. Тогда BE1||CH||DK. По теореме Фалеса имеем BH=HK.
Задача 11. В прямоугольном треугольнике АВС проведена медиана СМ. На катетах АС и ВС вне треугольника построены квадраты АСКН и ВСДЕ. Доказать, что прямые СМ и ДК перпендикулярны (рис. 24).
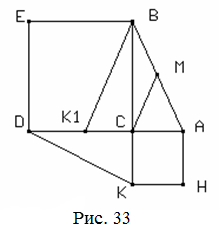
Рисунок 24
Анализ: Речь идет о прямоугольном треугольнике, в котором проведена медиана. На катетах этого треугольника построены квадраты. Нужно доказать перпендикулярность сторон.
Поиск решения: Рассмотрим поворот вокруг точки на 900, следовательно, докажем перпендикулярность.
Решение: Рассмотрим поворот вокруг точки С на 900:
 . Следовательно,
. Следовательно,  . Тогда
. Тогда  . В треугольнике АВК1 отрезок СМ является средней линией, поэтому СМ || ВК1. Тогда
. В треугольнике АВК1 отрезок СМ является средней линией, поэтому СМ || ВК1. Тогда  , так как
, так как  .
.
Задача 12. Доказать, что биссектрисы внутренних углов параллелограмма при пересечении образуют прямоугольник.
Анализ: Речь идет о параллелограмме. Нам нужно доказать, что биссектрисы внутренних углов параллелограмма при пересечении образуют прямоугольник.
Поиск решения: Воспользуемся поворотом вокруг точки пересечения диагоналей на 1800 или центральной симметрией относительно точки, а следовательно и докажем, что полученная фигура параллелограмм.
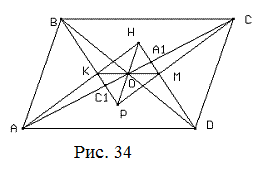
Рисунок 25
Решение: Пусть дан параллелограмм АВСД (рис. 25), АА1, ВВ1, СС1 и ДД1 - биссектрисы его внутренних углов; К, Н, М, Р - точки их пересечения. Надо доказать, что четырехугольник КНМР является прямоугольником. Рассмотрим поворот вокруг точки пересечения диагоналей параллелограмма на 1800, то есть центральную симметрию относительно точки  .
.
 .
.
Тогда  . Следовательно, четырехугольник КНМР - параллелограмм, так как его диагонали в точке пересечения делятся пополам. В параллелограмме АВСД имеем:
. Следовательно, четырехугольник КНМР - параллелограмм, так как его диагонали в точке пересечения делятся пополам. В параллелограмме АВСД имеем:  . Значит
. Значит  . Тогда в треугольнике АВК найдем
. Тогда в треугольнике АВК найдем  . В параллелограмме КНМР получили
. В параллелограмме КНМР получили , следовательно, этот параллелограмм - прямоугольник.
, следовательно, этот параллелограмм - прямоугольник.
Задача 13. Дан равносторонний треугольник АВС и произвольная точка М (рис. 26). Доказать, что длина большего из трех отрезков МА, МВ, МС не больше суммы длин двух других.
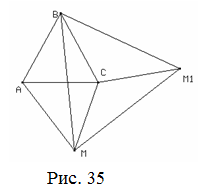
Рисунок 26
Анализ: Речь идет о равностороннем треугольнике и произвольной точке. Нам нужно доказать, что длина большего из трех отрезков не больше суммы длин двух других.
Поиск решения: Воспользуемся поворотом вокруг точки на 600 и тогда докажем наше утверждение.
Решение: Пусть ВМ - наибольший из указанных отрезков. Рассмотрим поворот вокруг точки В на 600.
 . Тогда
. Тогда  . Поэтому АМ=СМ1, ВМ=ВМ1. Следовательно, треугольник МВМ1 будет равносторонним. Поэтому МВ=ММ1. Но в треугольнике МСМ1: ММ1<МС+СМ1=МС+МА, то есть МВ<МС+МА. Равенство будет в том и только в том случае, когда точка М лежит на окружности, описанной около треугольника АВС.
. Поэтому АМ=СМ1, ВМ=ВМ1. Следовательно, треугольник МВМ1 будет равносторонним. Поэтому МВ=ММ1. Но в треугольнике МСМ1: ММ1<МС+СМ1=МС+МА, то есть МВ<МС+МА. Равенство будет в том и только в том случае, когда точка М лежит на окружности, описанной около треугольника АВС.
2.3 Комплекс задач, решаемых методом движений
2.3.1 Задачи, решаемые методом центральной симметрии
-
Даны прямая, отрезок и точка О. Построить отрезок так, чтобы его концы принадлежали данным прямой и отрезку, а точка О была бы его серединой.
-
В треугольнике ABC проведены медианы АА1, ВВ1 и СC1, пересекающиеся в точке М. Точки P1Q и R являются соответственно серединами отрезков AM, BM и СМ. Доказать, что A1B1C1 = PQR.
-
Построить треугольник по двум сторонам и медиане к третьей стороне. В каких пределах может изменяться длина медианы, если длины сторон треугольника равны а и b?
-
Точки М, N и К являются серединами отрезков, одним концом которых является вершина треугольника ABC, а другим - точка пересечения его медиан. Доказать, что треугольник, вершинами которого являются точки пересечения прямых, содержащих точки М, N и К, параллельных соответствующим сторонам треугольника ABC, равен треугольнику ABC.
-
Даны две окружности и точка Р. Построить параллелограмм так, чтобы его вершины принадлежали данным окружностям, а точка Р являлась пересечением диагоналей параллелограмма.
-
Прямая, содержащая точку пересечения диагоналей параллелограмма ABCD, отсекает на его сторонах отрезки BE и DF. Доказать, что эти отрезки равны.
-
Разделить параллелограмм на две равновеликие части.
-
Из концов диаметра ВС окружности с центром О проведены две равные хорды ВА и CD так, что ВА и CD не пересекаются и лежат по разные стороны от ВС. Доказать, что ОА и 0D принадлежат одной прямой и DO = ОА.
-
Около окружности описан шестиугольник с параллельными противолежащими сторонами. Доказать, что противолежащие стороны этого шестиугольника равны.
-
Противолежащие стороны выпуклого шестиугольника ABCDEF попарно параллельны и равны. Какую часть площади шестиугольника составляет площадь треугольника АСЕ?
-
Ознакомьтесь и выполните задание
Рисунок 27 - Симметрия орнаментов
-
На окружности даны точки А и В, на прямой l дана точка М. Найти на окружности такую точку X, чтобы прямые АХ и ВХ пересекали прямую l в точках, находящихся на равных расстояниях от точки М.
-
Через точку М угла ABC, не принадлежащую его сторонам, провести секущую так, чтобы получился треугольник наименьшей площади.
-
Около окружности описан восьмиугольник, противолежащие стороны которого попарно параллельны. Доказать, что противолежащие стороны восьмиугольника попарно равны.
-
В данный четырехугольник вписать параллелограмм при условии, что две вершины параллелограмма фиксированы и принадлежат: а) противолежащим сторонам; б) смежным сторонам четырехугольника.
-
Медиана СМ треугольника ABC образует со сторонами АС и ВС соответственно углы и . Какой из этих углов больше, если АС < ВС?
2.3.2 Задачи, решаемые методом осевой симметрии
-
Построить пятиугольник, имеющий: а) одну ось симметрии; б) более одной оси симметрии.
-
Через данную точку провести прямую, пересекающую две данные прямые под равными углами.
-
Построить треугольник по стороне, разности двух других сторон и углу, заключенному между первой стороной и большей из двух других сторон.
-
Построить треугольник по двум сторонам и разности противолежащих им углов.
-
Внутри острого угла дана точка М. Построить треугольник МАВ наименьшего периметра, вершины А и В которого лежат на сторонах угла.
-
Построить выпуклый четырехугольник ABCD, имеющий только одну ось симметрии - прямую BD.
-
Можно ли построить такой пятиугольник, диагональ которого лежит на его оси симметрии? Ответ обосновать.
-
Доказать, что в выпуклом многоугольнике с нечетным числом вершин и имеющем оси симметрии, ни одна из диагоналей не может лежать на оси симметрии.
-
Построить треугольник по углу, прилежащей стороне и разности двух других сторон.
-
Построить треугольник по заданной ненулевой разности двух его углов и длинам сторон, противолежащих этим углам.
-
Даны две концентрические окружности. Построить ромб, отличный от квадрата, чтобы: а) две вершины принадлежали одной окружности, а две другие вершины - другой; б) три вершины принадлежали одной окружности, а одна - другой.
-
Выполните задание (рис. 28)

Рисунок 28 - Флэш - проект «Оси симметрии»
-
Построить треугольник ABC по трем данным серединным перпендикулярам р, q и r к его сторонам.
-
В данную окружность вписать треугольник, стороны которого параллельны трем данным прямым.
-
Около треугольника ABC описана окружность, пересекающая биссектрису угла С в точке М. Из ортоцентра Н треугольника проведен перпендикуляр HD к биссектрисе так, что точка D принадлежит lc. Доказать, что CD : СМ = cos С.
-
Около окружности с центром О описан четырехугольник ABCD. Доказать, что АОВ + C0D = 180°.
-
В данную окружность вписать пятиугольник, стороны которого параллельны пяти данным прямым.
-
На биллиардном столе прямоугольной формы лежит шар. В каком направлении необходимо произвести удар по шару, чтобы, отразившись от всех бортов, шар прошел через свое первоначальное положение?
-
Доказать, что точка пересечения прямых, которые содержат боковые стороны равнобокой трапеции, точка пересечения ее диагоналей и середины оснований трапеции принадлежат одной прямой.
-
Доказать, что прямая, содержащая середины двух параллельных хорд окружности, проходит через ее центр.
-
Окружность F1 пересекает концентрические окружности F2 и F3 соответственно в точках А, В и С, D. Доказать, что хорды АВ и CD параллельны.
-
Три равные окружности имеют общую точку. Доказать, что окружность, проведенная через вторые точки пересечения данных трех окружностей, равна данным.
-
На плоскости даны четыре равные окружности, проходящие через одну точку и пересекающиеся вторично в шести точках. Доказать, что четыре окружности, проходящие через каждые три из этих шести точек, взятых по одной на каждой из данных окружностей, пересекаются в одной точке.
-
На плоскости даны прямая и точка, не лежащая на ней. Найти геометрическое место центров правильных треугольников, одна вершина которых находится в данной точке, а другая - на данной прямой.
-
На плоскости даны прямая и точка, не принадлежащая ей. Найти геометрическое место третьих вершин правильных треугольников, одна вершина которых находится в данной точке, а другая - на данной прямой.
-
Может ли биллиардный шар, отразившись поочередно от двух соседних сторон прямоугольного биллиардного стола, прийти в исходную точку?
-
Составление фигур из семи кусочков квадрата, разрезанного в соответствии с рисунком, причем при составлении заданных фигур должны быть использованы все семь кусочков, и они не должны налегать, даже частично, друг на друга. Попробуйте сложить эти фигуры из частей квадрата.
Рисунок 29 - Схема составления фигур
2.3.3 Задачи, решаемые методом поворота
-
Построить квадрат ABCD по его центру О и точкам М и N, которые принадлежат соответственно прямым АВ и ВС (ОМ не равно ON).
-
Построить такой равносторонний треугольник, чтобы одна его вершина совпала с данной точкой О, а две другие принадлежали двум данным окружностям.
-
Через данную внутри окружности точку провести хорду данной длины.
-
На сторонах ВС, СА и АВ равностороннего треугольника ABC даны соответственно точки М, N и Р. Известно, что ВМ : МС = CN : NA = АР : РВ = k.
а) Доказать, что MNP - равносторонний треугольник,
б) Вычислить MN,если ВС = a, k = 2.
-
Ha сторонах АВ и ВС треугольника ABC как на основаниях построены одинаково ориентированные квадраты ABMN и ВСОР. Обозначим их центры через О1 и О2, середину стороны АС - через К, середину отрезка МР - через L. Доказать, что четырехугольник O1LO2K - квадрат.
-
На сторонах АС и ВС треугольника ABC вне его построены равносторонние треугольники АСВ1 и ВСА1. Найти углы треугольника МА1О, где М - середина стороны АВ, точка О - центр треугольника АСВ1.
-
На продолжении сторон прямоугольного треугольника ABC отложены отрезки АР и АЕ, равные соответственно катетам АВ и АС треугольника ABC. Доказать, что прямая, содержащая медиану AM треугольника ABC, перпендикулярна отрезку DE.
-
Дан квадрат ABCD. Через центр этого квадрата проведены две взаимно перпендикулярные прямые, отличные от прямых АС и BD. Доказать, что фигуры, являющиеся пересечением этих прямых с квадратом, равны.
-
Ознакомьтесь и выполните задание (рис. 30)
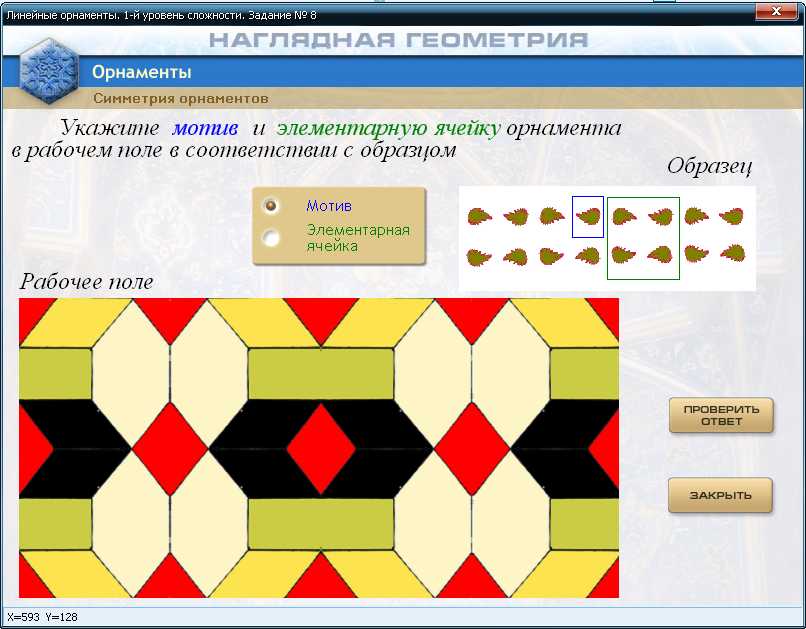
Рисунок 30 - Создание орнаментов
-
Через центр О правильного треугольника ABC проведены две прямые, образующие между собой угол в 60°. Доказать, что отрезки этих прямых, заключенные внутри треугольника, равны.
-
Построить равносторонний треугольник так, чтобы одной его вершиной была точка Р, другая принадлежала прямой а, третья - прямой b.
-
На сторонах АВ и АС треугольника ABC вне его построены квадраты ABNM и ACQP. Доказать, что МС BP.
-
Даны два одинаково ориентированных квадрата MP0R и MUVW. Доказать, что отрезки PU и RW равны и перпендикулярны.
-
На сторонах АВ и ВС треугольника ABC построены квадраты с центрами D и Е, причем точки С и D расположены по одну сторону от АВ, а точки А и Е - по разные стороны от ВС. Доказать, что угол между прямыми АС и DE равен 45°.
-
Построить квадрат ABCD по его центру О и двум точкам М и N, принадлежащим прямым ВС и CD (ОМ не равен ON).
2.3.4 Задачи, решаемые методом параллельного переноса
-
Даны четыре различные точки А, В, С и D. Провести через них соответственно четыре параллельные прямые а, b, с и d так, чтобы ширина полосы между прямыми а и b была равна ширине полосы между прямыми c и d.
-
Построить трапецию по ее диагоналям, углу между ними и одной из сторон.
-
Доказать что если прямая, проходящая через середины оснований трапеции, образует равные углы с прямыми, содержащими ее боковые стороны, то трапеция равнобочная.
-
Две равные окружности касаются внешним образом в точке К. Секущая, параллельная линии центров, пересекает окружности последовательно в точках А, В, С и D. Доказать, что величина угла АКС не зависит от выбора секущей.
-
Определить площадь трапеции, все стороны которой известны.
-
На окружности с центром О даны такие три точки А, В и С, что АОВ=ВОС=60°. Доказать, что расстояние от точки В до произвольного диаметра окружности равно или сумме, или абсолютному значению разности расстояний от точек А и С до этого диаметра.
-
Через точку М, лежащую вне окружности , провести прямую т, пересекающую в двух точках А и В, так, чтобы АВ = ВМ.
-
Прямые, которым принадлежат боковые стороны трапеции, перпендикулярны. Доказать, что длина отрезка, концами которого являются середины оснований трапеции, равна полуразности длин оснований.
-
Сумма длин оснований трапеции равна 21 см, а длины диагоналей равны 13 и 20 см. Вычислить площадь трапеции.
-
Расстояние между центрами двух пересекающихся окружностей равных радиусов равно d. Прямая, параллельная линии центров, пересекает первую окружность в точках А и В, вторую - в точках С и D. Найти длину отрезка АС (рис. 31).
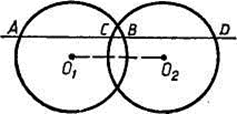
Рисунок 31
-
Построить четырехугольник ABCD, зная длину его сторон и длину отрезка MN, соединяющего середины сторон АВ и DC.
-
Диагонали трапеции с основаниями а и b взаимно перпендикулярны. Какие значения может принимать высота трапеции?
-
Охарактеризуйте представленный бордюр (рис. 32)

Рисунок 32 - Схема бордюра
2.3.5 Задачи, решаемые методом скользящей симметрии
-
Докажите, что если фигура имеет две перпендикулярные оси симметрии, то она имеет центр симметрии.
-
Четырехугольник имеет ось симметрии. Докажите, что этот четырехугольник либо является равнобедренной трапецией, либо симметричен относительно диагонали.
-
Дана точка M(x;y). Найдите координаты точки, симметричной точке M относительно а) начала координат; б) точки K(a;b).
-
На плоскости дан треугольник ABC и точка M. Известно, что точки, симметричные точке M относительно двух сторон треугольника ABC попадают на окружность, описанную около треугольника ABC. Докажите, что точка, симметричная точке M относительно третьей стороны, также попадает на эту окружность.
-
Может ли фигура иметь центр симметрии и ровно одну ось симметрии?
-
ABC - данный разносторонний треугольник, A1, B1, C1 - точки касания его вписанной окружности со сторонами BC, AC, AB соответственно, A2, B2, C2 - точки, симметричные точкам A1, B1, C1 относительно биссектрис соответствующих углов треугольника ABC. Докажите, что A2C2 || AC
-
Докажите, что окружность при скользящей симметрии переходит в окружность.
-
Ось симметрии многоугольника пересекает его стороны в точках A и B. Докажите, что точка A является либо вершиной многоугольника, либо серединой стороны, перпендикулярной оси симметрии.
-
Охарактеризуйте представленный бордюр (рис. 33)
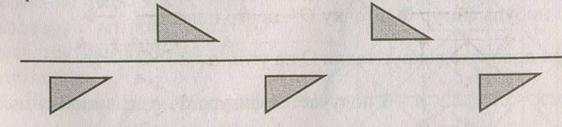
Рисунок 33 - Схема бордюра
-
Рассмотрите и охарактеризуйте все представленные в классификации типы орнаментов (рис. 34)
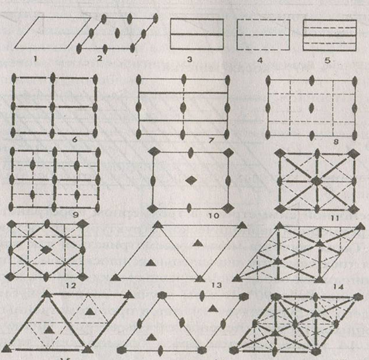
Рисунок 34 - Типы орнаментов
-
Ознакомьтесь и законспектируйте (рис. 35)
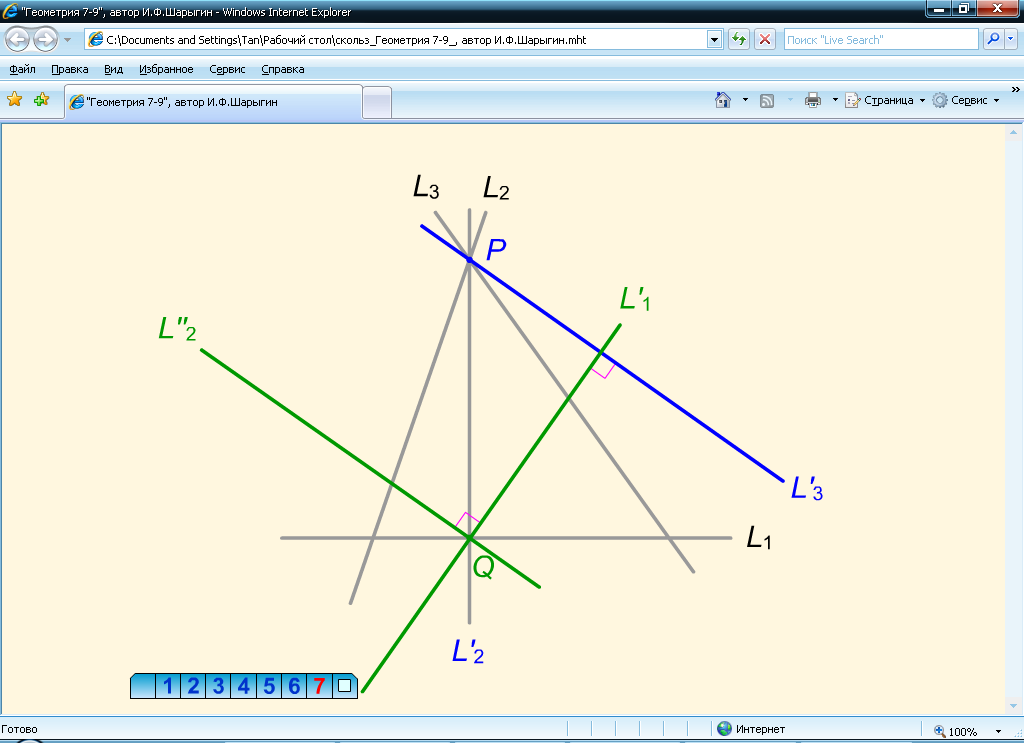
Рисунок 35 - Скриншот флэш - проекта «Скользящая симметрия»
2.3.6 Компьютерное обеспечение разработанного комплекса задач
Разработанный комплекс задач, решаемых методом движений, состоит из пяти блоков, каждый из которых ориентирован на отработку умений применять определенный метод. Данный комплекс сопровождается соответствующим программным обеспечением.
Сегодня преподавателям любой дисциплины предоставляется широкий спектр образовательных интерактивных материалов для проведения занятий, которые становятся обучающими средствами, позволяющими в интересной новой форме усвоить учебный материал. В рамках использования разработанного комплекса задач предусмотрено использование разных электронных модулей для представления свойств движений (флэш - приложения), доказательства теорем. Особое место отведено тестирующей системе «Наглядная геометрия «Орнаменты». Скриншоты используемых программ представлены в приложениях:
-
Приложение 1 - тестирующая система «Орнаменты»;
-
Приложение 2 - тест «Оси симметрии»;
-
Приложение 3 - флэш-проект «Скользящая симметрия».
ЗАКЛЮЧЕНИЕ
Цель курсовой работы состояла в разработке комплекса задач, решаемых методом движений плоскости.
Для реализации цели в первой главе были исследованы теоретические основы движений плоскости, а именно отображение и преобразование множеств, понятие движения и его виды, движение I рода и II рода, аналитическое выражение движения, а также классификация движений плоскости. Дано описание метода параллельного переноса, поворота, центральной симметрии, осевой симметрии, скользящей симметрии.
Во второй главе проведен анализ школьных учебников геометрии, входящих в федеральный комплект, по теме «Движения плоскости». Предложен перечень задач, решенных с использованием метода движений. На основе вышеуказанного материала разработан комплекс задач, решаемых методом движений. Комплекс состоит из пяти блоков задач, ориентированных на отработку умений применять каждый метод движений в решении задач.
Представленный комплекс дополнен соответствующим программным обеспечением: флэш-проекты доказательства некоторых теорем, тестирующие системы.
Таким образом, задачи, поставленные в начале исследования, решены, тем самым цель работы достигнута.
Список использованных источников
1. Александров А. Д., Геометрия для 8 - 9 классов: учеб. пособие для учащихся шк. и кл. с углубл. изуч. математики /А. Д. Александров, А. Л. Вернер, В. И. Рыжик. - 5 - е изд. - М. : Просвещение, 2006.
2. Александров П. С., Лекции по аналитической геометрии: учеб. пособие для студентов мат. спец. пед. вузов и ун - тов / П. С. Александров. - М. : Наука, 1968.
3. Антонова Т. И., Теория и методика обучения математике: учеб. пособие по системе профессиональной подготовки учителя общеобразовательных учреждений для студентов 3 курса, обучающихся по специальности 032100.00 «Математика с дополнительной специальностью» : В 34, / Т. И. Антонова, Т. С. Кармакова, Р. Г. Колпаков. - Хабаровск : изд-во ХГПУ, 2004.
4. Антонов Н. С., Современные проблемы методики преподавания математики. Сборник статей: учеб. пособие для студентов мат. и физ. - мат. спец. пед. ин - тов / Н. С. Антонов, В. А. Гусев. - М. : «Просвещение», 1985.
5. Атанасян Л. С., Геометрия I часть: учеб пособие для студентов мат. спец. пед. вузов и ун - тов / Л. С. Атанасян, В. Т. Базылев. - М. : Просвещение, 1986.
6. Атанасян Л. С., Геометрия, 7 - 9: учеб. для общеобразовательных Учреждений / Л. С. Атанасян, В. Ф. Бутузов, С. Б. Кадомцев и др. - 13 - е изд. - М. : Просвещение, 2003.
7. Базылев В. Т., Геометрия I часть: учеб. пособие для студентов мат. спец. пед. вузов и ун - тов / В. Т. Базылев, К. И. Дуничев, В. П. Иваницкая. - М. : Просвещение, 1974.
8. Бородина Н. А., обобщающий урок по теме «Движение» / Н. А. Бородина // Математика в школе. - 2002. - № 3. - С. 28 - 30.
9. Гаврилова Н. Ф., Поурочные разработки по геометрии: 9 класс. - М. : ВАКО, 2008.
10. Карпушина Н. М., развивающие задачи по теме «Движения плоскости» / Н. М. Карпушина // Математика в школе. - 2005. - № 8. - С. 53 - 59.
11. Ковалева Г. И., Геометрия. 7 - 9 классы: тесты для текущего и обобщающего контроля / Г. И. Ковалева, Н. И. Мазурова - Волгоград : Учитель, 2008.
12. Корякина Е., Контроль и диагностика учебных достижений учащихся с помощью технологических карт / Е. Корякина // Математика. - 2009. - № 3. - С. 14 - 21.
13. Погорелов А. В., Геометрия, 7 - 9: учеб. для общеобразовательных учреждений / А. В. Погорелов - М. : Просвещение, 2001.
14. Саранцев Г. И., Методика обучения математике в средней школе: учеб. пособие для студентов мат. спец. пед. вузов и ун - тов / Г. И. Саранцев. - М. : Просвещение, 2002.
15. Фролова Г.В., Педагогические возможности ЭВМ / Г. В. Фролова. - Новосибирск: Наука, сибирское отделение, 1998.
16. Холодная О. В., Методика изучения движений плоскости в основной школе с опорой на образное мышление учащихся / О. В. Холодная: автор. десер. / Московский гос. пед. ун - т. - М., 2002.
17. Шарыгин И.Ф., Геометрия, 7 - 9 классы: учеб. для общеобразовательных учреждений / И. Ф. Шарыгин - М. : Дрофа, 2007.
18. Для подготовки данной работы были использованы следующие сайты:
-
wikipedia.org
-
science-education.ru
-
testolog.narod.ru
-
fsu-expert.ru/node/834
-
regobraz.ru/statia.php?nm=152
1Поскольку учебник Александрова А.Д. [1] ориентирован на углубленное изучение математики, то в данный анализ мы его не включаем.