- Преподавателю
- Информатика
- Методическая разработка Образовательная робототехника
Методическая разработка Образовательная робототехника
| Раздел | Информатика |
| Класс | 4 класс |
| Тип | Другие методич. материалы |
| Автор | Редькина А.С. |
| Дата | 14.01.2016 |
| Формат | doc |
| Изображения | Есть |

Мастер-класс по теме:
«Образовательная робототехника»
Цели мастер-класса:
1. Собрать по инструкции робота, изучить его возможности и составить программы «Движение по линии» и «Скажи «red»или «detect»; изучить работу программы, особенности движения модели робота; закрепить навыки конструирования по готовым инструкциям сборки моделей по инструкции, составления и загрузки программ.
2. Развитие творческих способностей, логического мышления, моторики учащихся.
3. Воспитание чувства коллективизма, умения работать в команде, ответственности, уважительного отношения к мнению своих сверстников.
Этот мастер-класс решает следующие образовательные задачи:
-
развитие словарного запаса обучающихся и навыков общения;
-
установление причинно-следственных связей во время учебно-исследовательской деятельности;
-
анализ результатов, поиск новых решений, коллективная выработка идей;
-
экспериментальное исследование, оценивание (измерение) влияния отдельных факторов на работу модели в целом;
-
проведение систематических наблюдений и измерений;
-
использование таблиц, схем и списков для отображения и анализа полученных данных;
-
развитие логического и алгоритмического мышления и навыков программирования заданного поведения модели.
Мастер-класс делится на 7 этапов:
-
Просмотр видеоролика о роботехнике и роботах (5 мин.)
-
Вводная беседа учителя информатики и ИКТ Редькиной А.С.(5 мин.)
-
Конструирование (10 мин.)
-
Программирование (10 мин.)
-
Презентация роботов (5 минуты)
-
Подведение итогов (2 мин.)
-
Рефлексия (3 мин.)
План проведения
-
Просмотр видеоролика о роботехнике и роботах - 5 мин.
-
Вводная беседа учителя информатики и ИКТ Редькиной А.С. - 5 мин. Затронула вопросы актуальности роботов и робототехники в целом, основы конструирования и программирования роботов, созданных на основе конструктора Lego Mindstorms NXT 2.0. Презентация роботов, разработанных руками учащихся МКОУ СОШ №17 р.п. Юрты
-
Учащиеся вместе с педагогом вырабатывают и утверждают тему, в рамках которой будет реализовываться проект. Затем группа разбивается на две команды, и каждая команда собирает и программирует робота. Занимаясь конструированием, ребята изучают простые механизмы, учатся работать руками, они развивают элементарное конструкторское мышление, фантазию, изучают принципы работы многих механизмов. В ходе мастер-класса повышается коммуникативная активность каждого ребёнка, формируется умение работать в паре, в группе, происходит развитие творческих способностей.
-
Программирование. Каждая команда программирует робота и смотрит на него в действии.
-
Презентация роботов.
-
Подведение итогов.
-
Рефлексия. Обдумывая и осмысливая проделанную работу, учащиеся углубляют понимание предмета. Они укрепляют взаимосвязи между уже имеющимися у них знаниями и вновь приобретённым опытом.
Приступая к занятиям, педагог должен четко формулировать образовательную цель каждого занятия. Ученикам важно знать, что они будут изучать, а главное - зачем, что это им даст в будущем с практической точки зрения.
В таблице ниже приведен план проведения.
Наименование этапа
Время
Содержание
11
Просмотр видеоролика о роботехнике и роботах
5 мин.
Видеоролик о роботехнике и роботах
22
Вводная беседа
5 мин.
В вводной беседе затронула вопросы актуальности роботов и робототехники в целом, основы конструирования и программирования роботов, созданных на основе конструктора Lego Mindstorms NXT 2.0.
33
Конструирование
10 мин.
Учащиеся вместе с педагогом вырабатывают и утверждают тему, в рамках которой будет реализовываться проект. Затем группа разбивается на две команды, и каждая команда собирает и программирует робота. Занимаясь конструированием, ребята изучают простые механизмы, учатся работать руками, они развивают элементарное конструкторское мышление, фантазию, изучают принципы работы многих механизмов. В ходе мастер-класса повышается коммуникативная активность каждого ребёнка, формируется умение работать в паре, в группе, происходит развитие творческих способностей.
44.
Программирование
10 мин.
Каждая команда программирует робота и смотрит на него в действии.
55
Презентация роботов
5 мин.
Необходимо продумать сам проект и грамотно его представить.
66
Подведение итогов
2 мин.
77
Рефлексия
3 мин.
Обдумывая и осмысливая проделанную работу, учащиеся углубляют понимание предмета. Они укрепляют взаимосвязи между уже имеющимися у них знаниями и вновь приобретённым опытом.
3. Практическая работа
На данном этапе урока учитель раздает учащимся инструкции по сборке робота-пятиминутки и помогает, в случае необходимости, отдельной группе в ходе сборки модели. Сегодня мы вам продемонстрируем конструктор Lego Mindstorms а затем испытаем его на практике:
-
создадим простейшего робота "Пятиминутку"
-
запрограммируем при помощи языка программирования высокого уровня LEGO MINDSTORMS NXT 2.0: робот - пятиминутка «Движение по линии», робот - пятиминутка «Скажи «startup»или «detect».
Программирование в стандартной среде программирования Lego Mindstorms NXT 2.0 не составляет особого труда. Весь процесс программирования выглядит как перетаскивание блоков с определенными действиями. Задавая параметры для датчиков, подстраиваем робота к знакомству с окружающей средой.
Учащийся 1: Включается NXT с помощью Кнопок Оранжевая кнопка: Вкл./Ввод Светло-серые стрелки: используются для перемещения влево-вправо по меню NXT. Темно-серая кнопка: Удалить/вернуться. NXT оснащен тремя портами выхода для подключения моторов. И четырьмя портами входа для подключения датчиков, которые соединяются между собой кабелями. Также имеется Порт USB, который соединяется с компьютером и можно загружать программы c компьютера на NXT .
Учащийся2: Поведение робота задается программой, которую можно создавать при помощи специального Программного Обеспечения на компьютере. Интерфейс этого Программного Обеспечения относится к типу сред "образного программирования", в котором вместо текстовых команд используются картинки.
4. Программирование роботов
Робот - пятиминутка «Движение по линии»
Может ли робот двигаться по линии, то есть так, чтобы сенсор всегда находился на черном поле? Для этого представим себе, что через некоторое время после старта сенсор «уехал» с черного поля и оказался на белом. Мы понимаем, что в этом случае робот должен немного подрулить, чтобы вернуться обратно на черную линию. Но куда именно подрулить: направо или налево? Дело в том, что белый цвет по обе стороны от черной линии одинаков. Поэтому, попав в такую ситуацию, робот должен двигаться не по линии, а по границе черного и белого. Что при этом изменится? Робот и человек по-разному воспринимают границу линии.
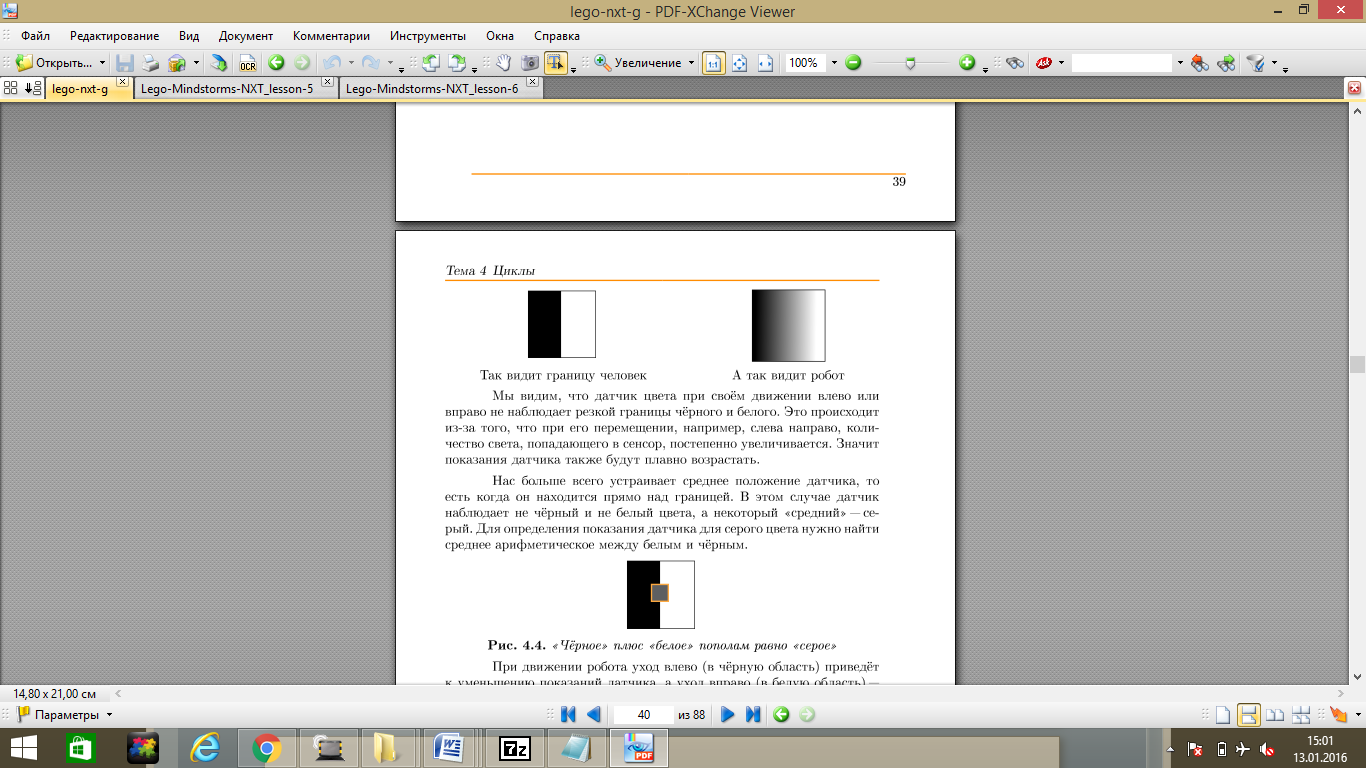
Мы видим, что датчик света при своем движении влево или вправо не наблюдает резкой границы черного и белого. Это происходит из-за того, что при его перемещении, например, слева направо, количество света, попадающего в сенсор, постепенно увеличивается. Значит, показания датчика также будут плавно возрастать.
Нас больше всего устраивает среднее положение датчика, то есть когда он находится прямо над границей. В этом случае датчик наблюдает не черный и не белый цвета, а некоторый «средний» - серый. Для определения показания датчика для серого цвета нужно найти среднее арифметическое между белым и черным.
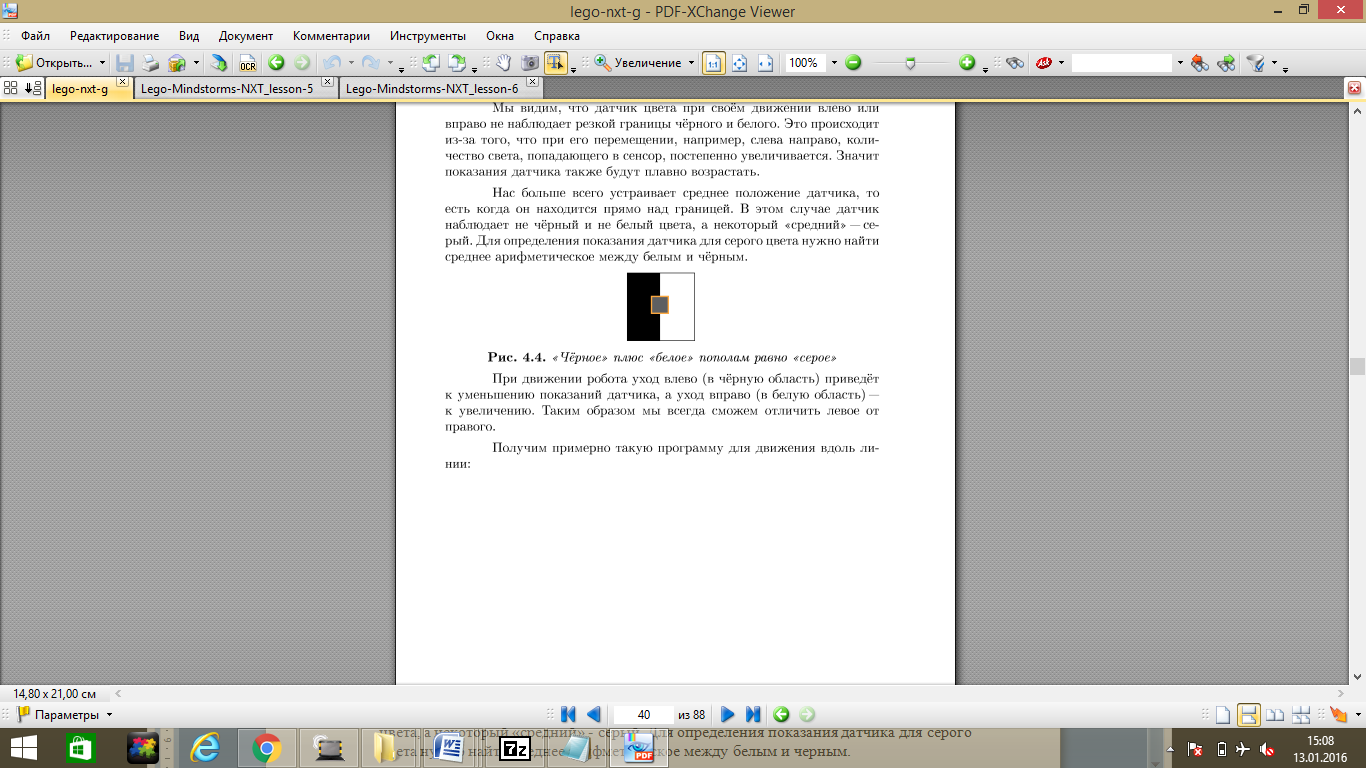
При движении робота уход влево (в черную область) приведет к уменьшению показаний датчика, а уход вправо (в белую область) - к увеличению. Таким образом, мы всегда сможем отличить левое от правого.
Получим примерно такую программу для движения вдоль линии:
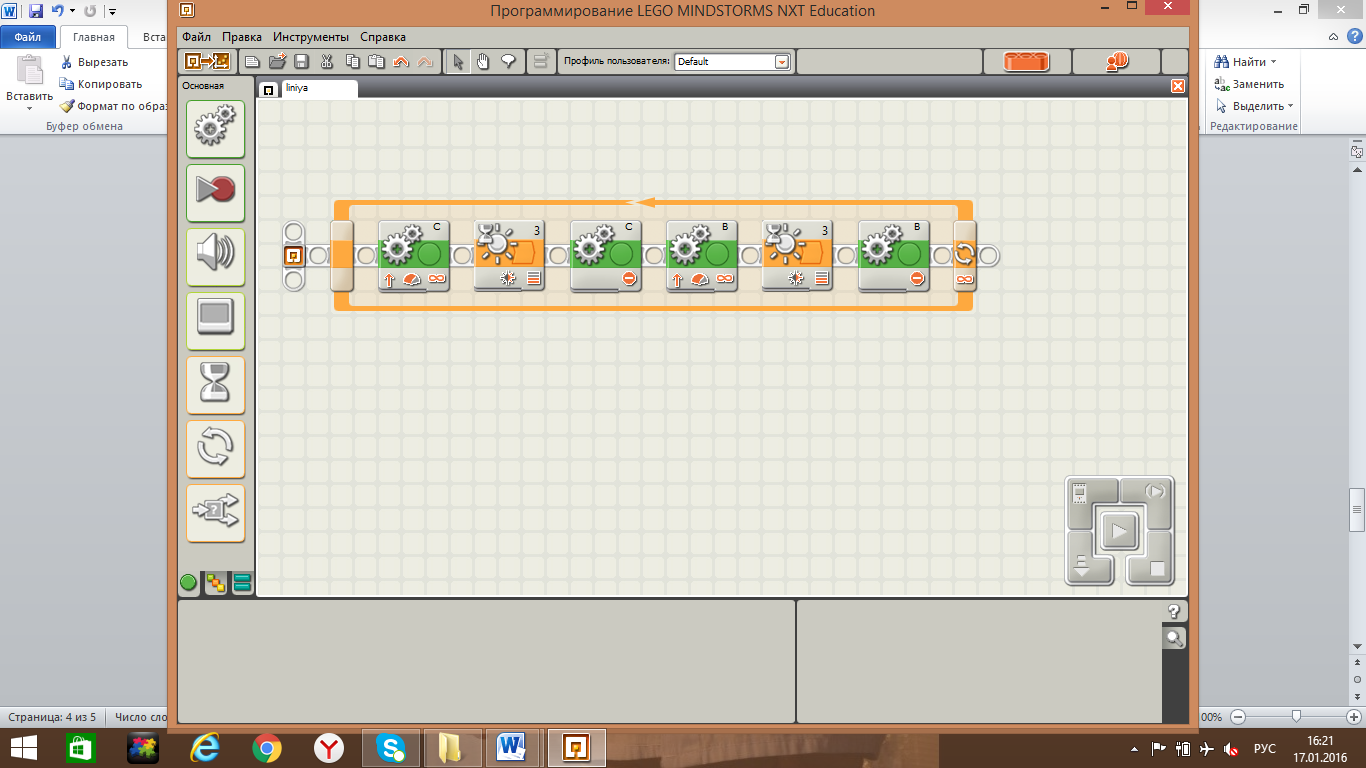
Перед стартом робот ставится на поле так, чтобы датчик освещенности «смотрел» на границу линии: черное - слева, белое - справа.
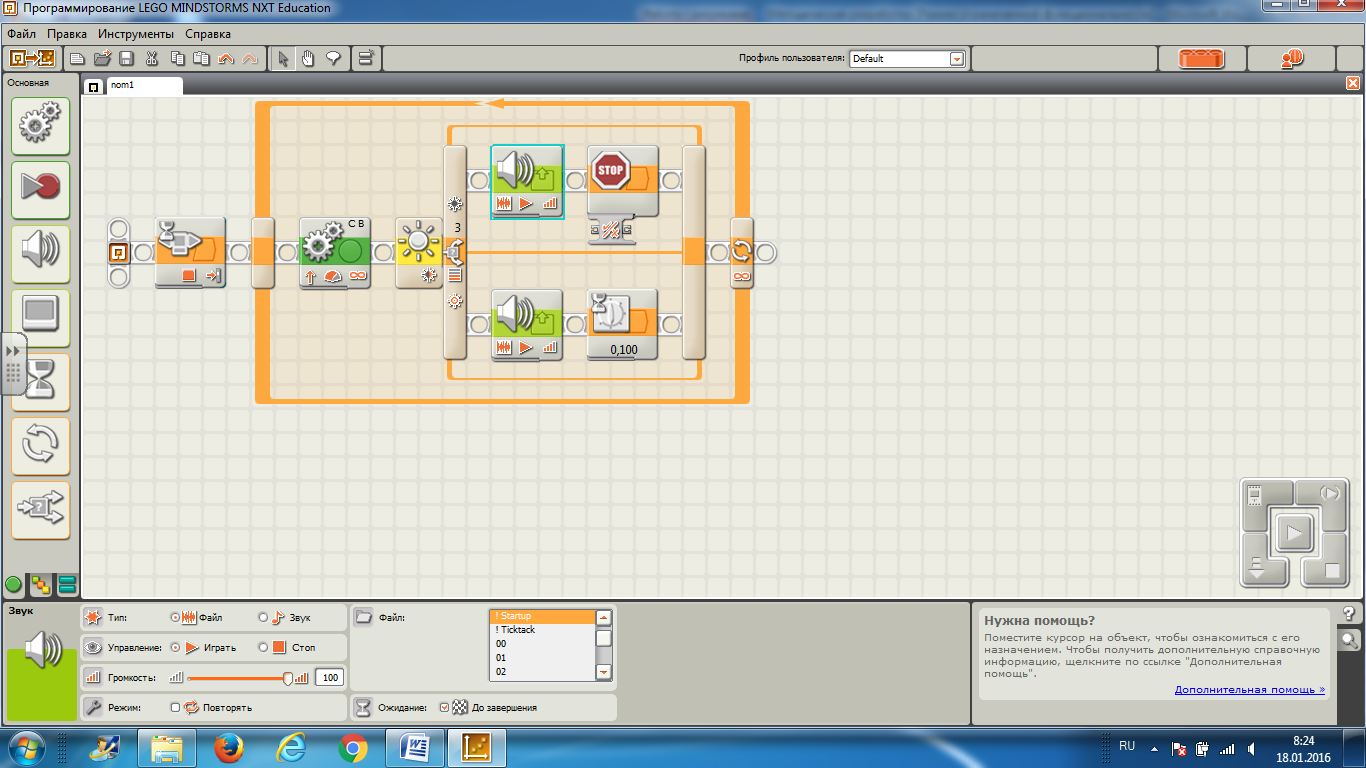
Робот - пятиминутка «Скажи «startup»или «detect»
Робот должен начать движение после нажатия на оранжевую кнопку START. Если датчик освещенности оказывается над синим объектом, то робот должен сказать «startup» и остановиться, а программа - завершиться. Иначе робот должен перемещаться и говорить «Detect».
Получим примерно такую программу для движения:
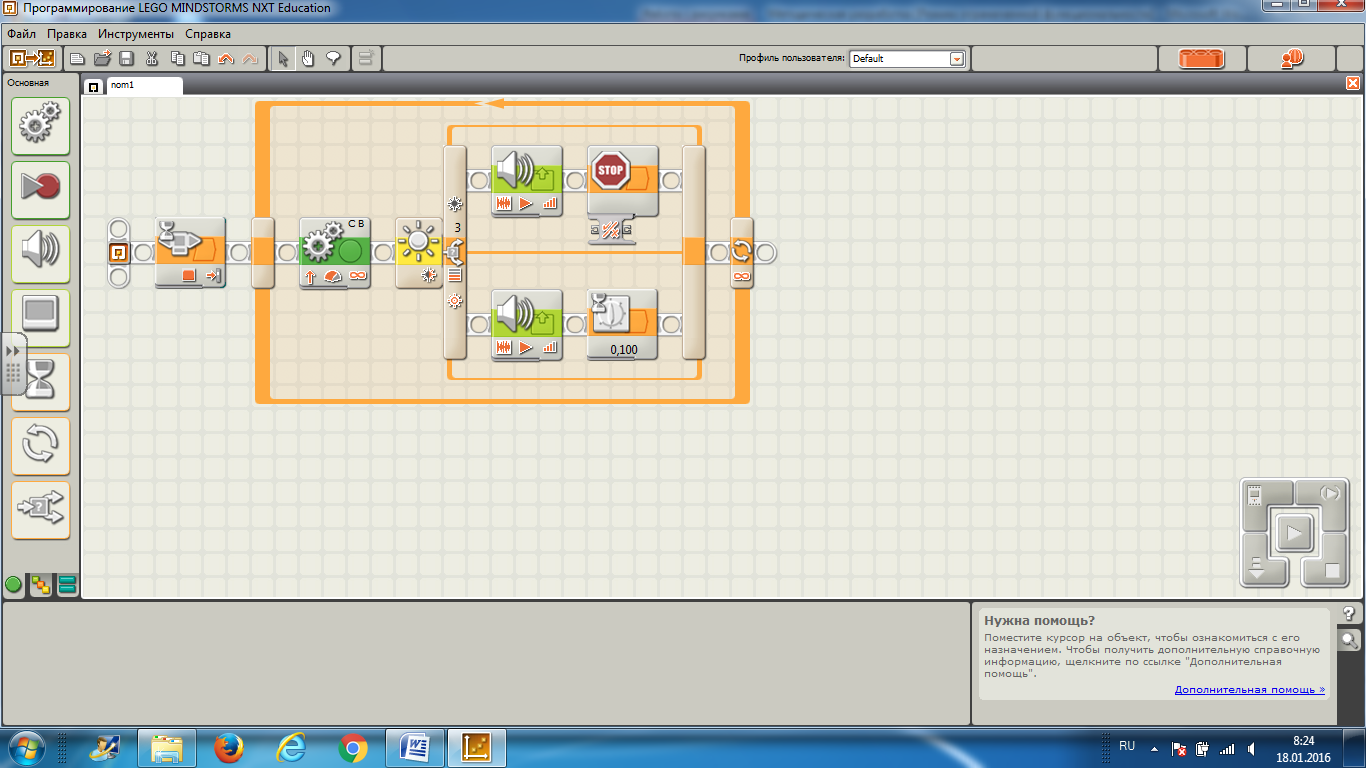
Самый первый блок «Wait» в этой программе позволяет запустить робот кнопкой Start на блоке. Робот может говорить при помощи блока Sound, он во второй ветке настраивается аналогично.
5. Презентация роботов
Каждая команда по очереди включает программу своего робота и проверяет его работоспособность.
6. Подведение итогов.
7. Рефлексия.
- Давайте оценим работу наших команд.
На доске прикреплены 2 робота, каждый из участников мастер-класса прикрепляет «улыбку» (смайл) к наиболее понравившемуся роботу.