- Преподавателю
- Информатика
- Урок по теме: Алгоритм обнаружения черты для робота LEGO MINDSTORMS EV3
Урок по теме: Алгоритм обнаружения черты для робота LEGO MINDSTORMS EV3
| Раздел | Информатика |
| Класс | - |
| Тип | Конспекты |
| Автор | Литвинов В.Н. |
| Дата | 07.10.2014 |
| Формат | docx |
| Изображения | Есть |

Автор разработки
Литвинов Владимир Николаевич, учитель информатики лицея № 136 город Новосибирск
Тема урока: Составление алгоритма «Обнаружение черты» для исполнителя Робот
Предмет: Информатика
Класс: 5
Ключевые слова: алгоритм, исполнитель, ЛЕГО-робот EV3, цветовой сенсор, составление простейших алгоритмов.
Аннотация: На изучение темы «Алгоритмы и исполнители» в 5 классе отводится 12 часов. После того как введены понятия алгоритм, линейный алгоритм, разветвляющийся алгоритм, циклический алгоритм, исполнитель, несколько уроков можно посвятить исполнителю LEGO MINDSTORMS EV3.
Оборудование: мультимедийный комплекс, интерактивная доска, компьютеры, среда программирования LEGO MINDSTORMS Education, ЛЕГО - роботы EV3, другие дидактические материалы (листы с условиями задач),
Цель урока
Научить создавать робота, который взаимодействует с окружающей средой: обнаруживает нарисованную на полу линию, при помощи распознавания её яркости.
Описание задачи
Использование цветных линий или проводов является одним из наиболее простых способов управления движением мобильных роботов. В этом задании, чтобы научить робота обнаружению линий, используется датчик освещённости. Сенсор освещенности (или цветовой сенсор) из набора Lego Mindstorms EV3, один из наиболее часто используемых сенсоров при программировании Lego-роботов. В режиме измерения отраженного цвета, помимо светочувствительного элемента, активируется светоиспускающий элемент (светодиод). Свет, выпущенный этим элементом, отражается от какой-нибудь поверхности и попадает обратно в светочувствительный элемент. В зависимости от того насколько светлая отражающая поверхность, в светочувствительный элемент приходит больше света. Это количество света преобразуется в цифровое значение и передается в программу. Чем темнее поверхность, тем меньше света приходит - в программу приходят маленькие значения; чем светлее поверхность, тем больше света приходит - программа оперирует с большими значениями. В самоучителе ознакомьтесь с описанием задания раздела 6. Обнаружение черты. Затем, следуя указаниям руководства по сборке и руководства по программированию, научите робота обнаружению тёмной линии.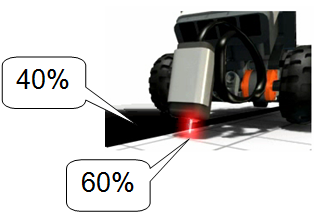
Соберите робота
- соберите базовое шасси робота в соответствии с указаниями руководства по сборке из самоучителя или при помощи одноименного буклета (если у вас уже собранный робот, то рекомендуем снять с него все ненужные насадки и привести его в соответствие изображению в Руководстве по сборке), установите на базовое шасси датчик цвета
- убедитесь, что провода не касаются подвижных частей робота, что заднее колесо вращается свободно и что все шины установлены правильно.
Составьте программу
- присвойте содержательное имя собственной программе;
- следуйте указаниям руководства по программированию;
- сохраните программу по окончании программирования;
- убедитесь, что робот подключен к компьютеру, и загрузите программу в LEGO MINDSTORMS Education EV3.
Ход выполнения задания
ЭТАП 1
Сначала изложите в письменном виде своё предположение - какие действия будет совершать робот.
Робот совершит движение по кругу, обнаружит черную линию и остановится.
Создайте показанную ниже программу и запустите её для проверки. Было ли предположение верным?
Пример 1: Движение до черной линии (1 вариант)
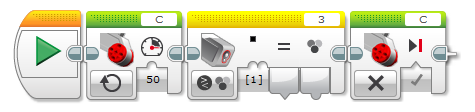
Эта программа заставляет робота двигаться до тех пор, пока датчик цвета не определит черный цвет, после этого робот останавливается. Программа использует блок «Ожидание» датчика цвета - «Сравнение» - режим «Цвет» для тестирования черного цвета.
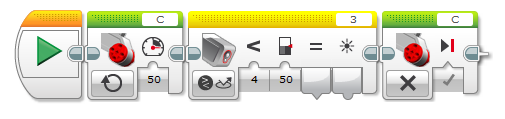
Пример 2: Движение до черной линии (2 вариант).
Эта программа заставляет робота двигаться до тех пор, пока датчик цвета не определит темный цвет, после этого робот останавливается. Программа использует блок «Ожидание» датчика цвета - «Сравнение» - режим «Яркость отраженного света» и ждет, пока яркость света не достигнет менее 50 %.
Для получения наилучших результатов установите порог чувствительности датчика.
ЭТАП 2
Теперь измените программу, чтобы робот двигался вперёд до тех пор, пока, не обнаружит линию. Перед загрузкой программы сохраните её под новым именем.

Ученику нужно внести изменения в программу, заменив блоки управления большим мотором, другими блоками - «Рулевое управление». Робот выполнит движение вперед доедет до черты и остановится.
ЭТАП 3
Проверьте, можете ли вы обеспечить обнаружение датчиком цвета линии более светлого тона. Перед загрузкой программы сохраните её под новым именем.
При обнаружении линии более светлого тона необходимо увеличить порог чувствительности датчика цвета подобрав его опытным путем.
Можно расширить рамки задания, предложив ученикам:
- дать пояснения к своим программам и объяснить функции каждого блока с использованием инструмента «Комментарий»;
- поэкспериментировать с программированием обнаружения линии других цветов (например: красного, синего и белого);
- запрограммировать движение вперед до второй или третьей черты.
Приложение 1.
Задание для учащихся
ОБНАРУЖЕНИЕ ЧЕРТЫ
Обязательным условием для любого робота является его способность выполнять управляемые и точные движения. Задача - научить робота обнаруживать линию и останавливаться у черты.
Ознакомьтесь в самоучителе в разделе 6. Остановиться у линии с описанием задания. Затем следуйте указаниям руководства по сборке и руководства по программированию и научите робота обнаруживать черту и останавливаться.
Соберите робота
- соберите базовое шасси робота в соответствии с указаниями руководства по сборке из самоучителя или при помощи буклета (если у вас уже собранный робот, то рекомендуем снять с него все ненужные насадки и привести его в соответствие изображению в руководстве по сборке);
- установите на базовое шасси датчик цвета
- проверьте подвижность модели, ослабление затяжки втулок может уменьшить трение;
- убедитесь, что провода не касаются подвижных частей робота, что заднее колесо вращается свободно и что все шины установлены правильно.

Составьте программу
- присвойте своей программе содержательное имя;
- следуйте указаниям Руководства по программированию;
- сохраните программу по окончании программирования;
- убедитесь, что робот подключен к компьютеру, и загрузите программу в NXT.
Приложение 2
Отчет о проделанной работе
Фамилия(-и):
ОБНАРУЖЕНИЕ ЧЕРТЫ
ЭТАП 1
Сначала изложите в письменном виде своё предположение - какие действия будет совершать робот. После этого запустите программу. Было ли предположение верным? Для получения наилучших результатов установите порог чувствительности датчика.
ЭТАП 2
Теперь измените программу, чтобы робот двигался вперёд до тех пор, пока, не обнаружит линию. Перед загрузкой программы сохраните её под новым именем. Опишите изменения, внесённые в программу:
ЭТАП 3
Проверьте, можете ли вы обеспечить обнаружение датчиком цвета линии более светлого тона. Перед загрузкой программы сохраните её под новым именем. Опишите изменения, внесенные в программу: