- Преподавателю
- Другое
- Конспект урока на тему Общие понятия об электроприводах
Конспект урока на тему Общие понятия об электроприводах
| Раздел | Другое |
| Класс | - |
| Тип | Конспекты |
| Автор | Елин В.В. |
| Дата | 10.02.2015 |
| Формат | docx |
| Изображения | Есть |

Общие понятия об электроприводах
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного, либо поступательного движения.
Электропривод состоит из четырех частей:
-
электродвигательного устройства (преобразует электрическую энергию в меха-
ническую);
-
преобразовательного устройства (служит для изменения и регулирования пара-
метров электрической энергии, поступающей к электродвигательному устройству);
-
устройства управления (обеспечивает управление процессом преобразования
энергии);
-
передаточного устройства (служит для согласования момента, частоты вращения,
вида и характера движения электродвигательного устройства и рабочих органов машин).
Один из вариантов блок-схемы ЭП приведен на рис. 1.
Блок-схема (рис. 1) соответствует структуре автоматизированных электроприводов - наиболее массовому типу ЭП. Другие типы ЭП могут иметь структуру большей или меньшей сложности.
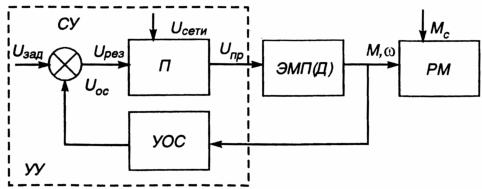
В общем случае ЭП включает:
-
преобразователь П,
-
электромеханический преобразователь (электродвигатель) ЭМП(Д),
-
рабочий механизм РМ,
-
устройство (или устройства) обратной связи УОС,
-
суммирующий узел СУ.
Преобразователь П, устройства обратной связи УОС и суммирующий узел СУ образуют устройство управления УУ. В зависимости от типа ЭП в УУ могут входить и другие элементы управления.
Преобразователь П предназначен для преобразования напряжения сети Uсети в напряжение Uпр другой частоты и величины, напряжение той же частоты и переменной величины, постоянное напряжение, изменяющееся по величине, и др. Это напряжение подается на ЭМП(Д), который, развивая на валу вращающий момент М, непосредственно или через передаточное устройство приводит в движение (вращательное или поступательное) рабочий механизм РМ с моментом сопротивления Мс.
УОС служит для контроля, измерения и последующего учета ЭП регулируемой величины (на рис. 1 - частоты вращения ω).
УС осуществляет функцию суммирования задающего напряжения Uзад и напряжения обратной связи по частоте вращения или иной величине Uос. Результирующее напряжение управления Uрез, равное разности между задающим напряжением и напряжением обратной связи, определяет выходные параметры преобразователя и, следовательно, скорость вращения двигателя.
По роду тока различают:
- электроприводы постоянного тока,
- электроприводы переменного тока.
В зависимости от способа передачи механической энергии к исполнительным органам рабочих машин и взаимодействия между ними электропривод подразделяется на:
1 - групповой (электропривод, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины),
2 - индивидуальный (обеспечивающий движение одного исполнительного органа рабочей машины),
3 - взаимосвязанный (два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей, нагрузок или положения исполнительных органов рабочих машин, например, цепные конвейеры),
4 - многодвигательный (взаимосвязанный электропривод, электродвигательные устройства которого совместно работают на общий вал),
5 - систему электрического вала (взаимосвязанный электропривод, обеспечивающий синхронное вращение двух и более электродвигателей, валы которых не имеют механической связи).
По виду движения электроприводы могут обеспечивать:
-
вращательное однонаправленное движение,
-
вращательное реверсивное
-
поступательное реверсивное движения.
По степени управляемости электропривод разделяют на:
- нерегулируемый (параметры привода изменяются только в результате возмущающих воздействий),
- регулируемый (параметры привода могут изменяться под действием управляющего устройства),
- программно-управляемый (управляемый в соответствии с заданной программой),
- следящий (автоматически отрабатывающий перемещение исполнительного органа рабочего механизма с определенной точностью в соответствии с произвольно меняющимся задающим сигналом),
- адаптивный (автоматически избирающий структуру или параметры системы управления при изменении условий работы механизма с целью выработки оптимального режима).
По уровню автоматизации различают:
- неавтоматизированный электропривод, в котором управление ручное,
- автоматизированный с автоматическим регулированием параметров,
- автоматический, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
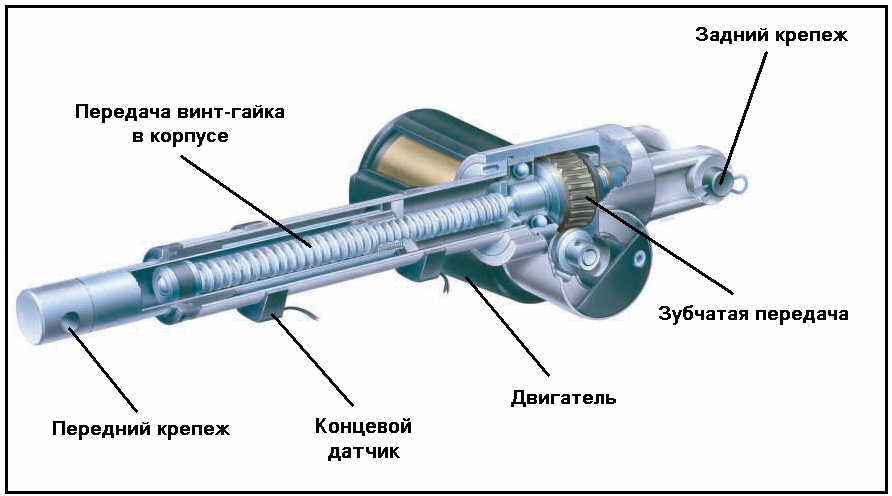
Электромеханический привод
Шаровый кран с электроприводом

Тельфер
