- Преподавателю
- Другое
- Перспективы использования программируемых пользователем вентильных матриц в промышленных системах управления электроприводом
Перспективы использования программируемых пользователем вентильных матриц в промышленных системах управления электроприводом
| Раздел | Другое |
| Класс | - |
| Тип | Другие методич. материалы |
| Автор | Макурин С.А. |
| Дата | 15.01.2016 |
| Формат | docx |
| Изображения | Есть |

Перспективы использования программируемых пользователем вентильных матриц в промышленных системах управления электроприводом
Макурин С.А.
ГАПОУ КГК
Одним из проявлений общемировой тенденции развития производства высокотехнологичной электротехнической продукции являются определенные успехи в области создания нового поколения регулируемых электроприводов с использованием вентильных электродвигателей.
Выпуск таких электроприводов осваивают в настоящее время практически все ведущие электротехнические компании. Предложение на рынке вентильных электродвигателей характеризуется широким мощностным диапазоном - от единиц ватт до сотен киловатт, которые могут использоваться в самых различных отраслях промышленности, в том числе и аэрокосмической.
Программируемая пользователем вентильная матрица (ППВМ, FPGA) - полупроводниковое устройство, которое может быть сконфигурировано производителем или разработчиком после изготовления. ППВМ программируются путём изменения логики работы принципиальной схемы, например, с помощью исходного кода на языке проектирования. ППВМ является одной из архитектурных разновидностей программируемых логических интегральных схем (ПЛИС, PLD).
В связи с увеличением стоимости энергии и влияния технологических процессов на окружающую среду, постоянно растут требования к устройствам, использующим электродвигатели, вводятся новые стандарты. Одним из путей решения проблем является применение интеллектуальных систем управления нагрузкой и скоростью электродвигателя, что позволит увеличить КПД электроприводов малой мощности на 14-30%.
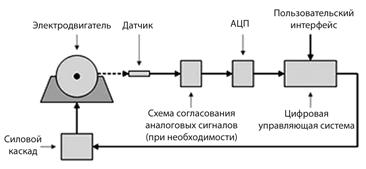
Рисунок 1 - Основные элементы системы управления электродвигателем.
Структурная схема системы управления электроприводом (СУЭ) показана на рисунке 1. В СУЭ для определения положения ротора и его скорости часто используются датчики на эффекте Холла или внешние оптические кодеры положения, сельсины или датчики магнитной индукции. Каждый из этих датчиков использует различные схемы включения и, следовательно, требует построения особых интерфейсов для приема и преобразования сигналов в формат, необходимый для цифровых систем управления. В случае применения детекторов противо-ЭДС, сельсинов, резистивных датчиков положения и некоторых других датчиков требуется аналогово-цифровой преобразователь (АЦП).
Скорость, вращающий момент и направление вращения электродвигателя управляются модулированным напряжением на обмотках электродвигателя. В системе с широтно-импульсной модуляцией управления направление вращения и скорость определяются последовательностью импульсов напряжения, приложенного к обмоткам электродвигателя. Интерфейс пользователя системы управления электродвигателя позволяет формировать команды инициализации, конфигурирования и контроля логики управления. Он может быть достаточно простым (например, схема регулировки скорости вращения) или довольно сложным (контроль напряжения, тока и температуры).
Существует много различных типов электродвигателей переменного тока, для каждого из которых имеются специальные методы управления, датчики, силовые каскады и алгоритмы работы. Поэтому разработка универсального конфигурируемого и высокоинтегрированного контроллера, который поддерживает широкий набор технологий управления электродвигателя, является весьма актуальной задачей. Такое решение сможет снизить затраты, улучшить характеристики и повысить энергоэффективность.
Потери энергии в электроприводе можно минимизировать с помощью интеллектуальной СУЭ. Важным фактором, влияющим на эффективность электроприводов переменного тока, является несогласованная нагрузка. Электродвигатели данного типа достигают максимальной эффективности при работе на полную номинальную нагрузку, однако такой режим работы встречается редко. Весьма часто разработчики выбирают более мощные электродвигатели, чем требуется для данного приложения. И даже если мощность электродвигателя выбрана так, чтобы он работал с номинальной нагрузкой, на практике он часто может работать с меньшей, т.е. менее эффективной нагрузкой. Например, эскалатор, мощность электродвигателя которого выбирается из расчета максимального количества пассажиров, большую часть времени перемещает сравнительно небольшое их количество, что снижает эффективность и вызывает потери энергии. С помощью СУЭ можно осуществлять интеллектуальный и непрерывный контроль нагрузки и согласовывать ее с подводимой мощностью. По существу, система управления подстраивает параметры электродвигателя так, чтобы он всегда работал при номинальной нагрузке.
Существует несколько возможных решений построения системы цифрового управления электродвигателем. Одним из вариантов является использование специализированного цифрового сигнального процессора (ЦСП, DSP), однако он может быть довольно дорогим и, кроме того, обычно требует дополнительных аналоговых компонентов и подсистем управления.
Другой возможностью является использование микроконтроллеров (МК), которые содержат, по крайней мере, некоторые из требуемых аналоговых блоков, например АЦП. Преимуществом МК является их сравнительно невысокая стоимость (1-2 долларов для промышленных приложений), однако их тактовая частота составляет 10…50 МГц, что ограничивает скорость широтно-импульсной модуляции (ШИМ). Кроме того, каждый МК имеет встроенные аналоговые блоки и обеспечивает ширину полосы для управления лишь одним электродвигателем. Следовательно, в робототехнических приложениях, содержащих несколько электродвигателей, может понадобиться несколько МК, часть из которых управляет интерфейсом пользователя и коммуникациями, что увеличивает стоимость системы.
По сравнению с МК, ППВМ смешанного сигнала стоимостью 5 долларов содержит достаточное количество аналоговых блоков и подсистем цифровой обработки для одновременного управления несколькими электродвигателями. Кроме того, тактовая частота этих компонентов составляет 250…300 МГц, а цифровая часть ППВМ может быть использована для обработки данных с массовым параллелизмом при реализации алгоритмов управления. К тому же, в случае применения ППВМ смешанного сигнала часть цифровых ресурсов микросхемы можно использовать для реализации микропроцессорного ядра. Кроме управления пользовательским интерфейсом и коммуникациями, это ядро можно использовать для контроля и точной регулировки аналоговых компонентов «на лету». Использование ППВМ смешанного сигнала с программным процессором позволяет строить схему управления электродвигателя без датчиков тока, что снижает стоимость системы.
Применение ППВМ в промышленных сетях
Эффективность СУЭ в промышленности во многом зависит от быстродействия и гибкости промышленных сетей. Одним из типов таких сетей является промышленный Ethernet - Industrial Ethernet (IE) - быстро развивающаяся технология, которая внедряется все более широко. Существует много стандартов IE (более 20), каждый из которых предлагает различные решения проблем, связанных с промышленными сетями.
Создание новых систем, использующих IE, выполняется довольно просто и быстро за счет применения недорогих стандартных разъемов, поддержки длинных линий связи (до 100 м) и возможности «горячего» подключения. Однако производители электроприводов сталкиваются с проблемой выбора протокола IE. Для заказчика важно иметь возможность осуществлять поддержку нескольких стандартов IE с минимальными издержками.
Очевидным решением этой проблемы является разработка заказных плат расширения (для каждого стандарта IE) или использование в контроллере многопротокольной заказной интегральной схемы (ASIC). Однако из-за большого числа стандартов (которые к тому же постоянно развиваются) и из-за того, что ASIC быстро устаревает (т.к. появляются версии с поддержкой новых или измененных стандартов), производители вынуждены финансировать разработку новых продуктов, которые способны поддерживать изменения. Такое решение является затратным, особенно при длительном сроке службы промышленного оборудования.
По сравнению с таким подходом, использование платы, содержащей недорогую микросхему ППВМ и трансиверы Ethernet PHY, позволяет осуществлять поддержку (с помощью соответствующих аппаратных и программных IP-блоков) любого стандарта IE. К тому же, поскольку ППВМ является программируемым устройством, его можно легко переконфигурировать для поддержки любого нового протокола, что может быть сделано в любое время, даже если устройство уже установлено в производственном оборудовании. Это позволяет системным разработчикам без труда программно поддерживать новые протоколы IE (или новые версии текущих протоколов) и использовать существующее оборудование предприятия.
Электроприводы с интеллектуальной системой управлением нагрузки конструктивно просты, надежны, имеют абсолютно жесткие механические характеристики и не требуют затрат энергии на возбуждение. Эти качества электрической машины обуславливают применение вентильных двигателей (ВД) в промышленных системах автоматики, роботах и манипуляторах, приводах подач и главного движения металлорежущих станков, координатных устройствах, автоматических линиях по обработке различных материалов или сборке изделий, упаковочных и печатных машинах, принтерах и плоттерах, намоточных и лентопротяжных механизмах, прецизионных системах слежения и наведения, в авиационной и медицинской технике. ВД имеют свою "нишу" в тяговом электроприводе (электровоз ВЛ80ВР), приводах рулевого управления летательных и подводных аппаратов, электромеханических устройствах автомобилей (электромеханические усилители руля, стартер-генераторные устройства гибридных автомобилей, стеклоподъемники и др.), мотор-колесах аккумуляторных индивидуальных транспортных средствах (электровелосипеды, инвалидные коляски различных разработок), в бытовых устройствах (стиральная машина "Орь-Автомат", проигрыватели компакт-дисков).
В последние годы работы по созданию современных ВД вновь приобрели былую интенсивность. В частности, комплексом электротехнических предприятий, объединенным Чебоксарским электроаппаратным заводом (ОАО "ЧЭАЗ"), на базе электрических машин серий ДВФ и ДВМ спроектирована новая серия современных отечественных вентильных двигателей 5ДВМ, а также тяговый вентильный электродвигатель ВМЭД-01 мощностью 120 кВт для специальных транспортных средств (городской автотранспорт, электромобиль) и автомобилей. В электрических машинах новой серии применены термостабильные отечественные постоянные магниты из материала "неодим-железо-бор" со специальными легирующими добавками, которые способствуют повышению коэрцитивной силы и сохранению свойств магнитов при нагреве до +170°С и пятикратной кратковременной перегрузке двигателя по моменту и току якоря.
Это обеспечивает снижение расхода дорогостоящих магнитных материалов и улучшению массогабаритных показателей машины. Проектированием и изготовлением ВД также занимаются: ОАО "КБ ПА", г. Ковров; лаборатория спецмашин (ЛСМ) ЗАО "СЗЭМО", г. Санкт-Петербург (дисковые СДПМ); конструкторское бюро мехатроники, г. Златоуст Челябинской области; отдел электромеханических систем воспроизведения движений (ОЭСВД) и лаборатория электромеханики Новосибирского государственного технического университета, а также многие другие предприятия.