- Преподавателю
- Другое
- Учебное пособие по статике
Учебное пособие по статике
| Раздел | Другое |
| Класс | - |
| Тип | Другие методич. материалы |
| Автор | Тихонова О.Ю. |
| Дата | 01.03.2015 |
| Формат | doc |
| Изображения | Есть |

МИНИСТЕРСТВО ОБРАЗОВАНИЯ ИРКУТСКОЙ ОБЛАСТИ ОБДАСТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ БЮДЖЕТНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ИРКУТСКИЙ ТЕХНИКУМ ТРАНСПОРТА И СТРОИТЕЛЬСТВА»
СТАТИКА
Учебное пособие
Иркутск 2014
МИНИСТЕРСТВО ОБРАЗОВАНИЯ ИРКУТСКОЙ ОБЛАСТИ ОБДАСТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ БЮДЖЕТНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ИРКУТСКИЙ ТЕХНИКУМ ТРАНСПОРТА И СТРОИТЕЛЬСТВА»
СТАТИКА
Учебное пособие
Иркутск 2014
Рецензент:
Кандидат физико-математических наук, доцент кафедры ТПиМП Б.В. Гаврилюк, ФГБОУ ВПО «ВСГАО».
Автор-составитель: О.Ю. Тихонова преподаватель ОГОБУ СПО «ИТТриС».
Динамика: учебное пособие / авт.-сост.: О.Ю. Тихонова преподаватель ОГОБУ СПО «ИТТриС». - Иркутск: изд-во Иркутский техникум транспорта и строительства, 2014 - 59с.
Учебное пособие предназначено для студентов ОГОБУ СПО «ИТТриС», обучающихся по специальности 190623 «Техническая эксплуатация подвижного состава железных дорог» и 190631 «Техническое обслуживание и ремонт автомобильного». Данное пособие включает программу учебной дисциплины «Техническая механика», учебный материал по разделу статика, задачи и их решения, перечень литературы.
© ОГОБУ СПО «ИТТриС», 2014г.
Оглавление
МИНИСТЕРСТВО ОБРАЗОВАНИЯ ИРКУТСКОЙ ОБЛАСТИ ОБДАСТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ БЮДЖЕТНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ИРКУТСКИЙ ТЕХНИКУМ ТРАНСПОРТА И СТРОИТЕЛЬСТВА» 1
СТАТИКА 1
Учебное пособие 1
Иркутск 2014 1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ ИРКУТСКОЙ ОБЛАСТИ ОБДАСТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ БЮДЖЕТНОЕ УЧРЕЖДЕНИЕ СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ИРКУТСКИЙ ТЕХНИКУМ ТРАНСПОРТА И СТРОИТЕЛЬСТВА» 2
СТАТИКА 2
Учебное пособие 2
Иркутск 2014 2
Рецензент: 3
Кандидат физико-математических наук, доцент кафедры ТПиМП Б.В. Гаврилюк, ФГБОУ ВПО «ВСГАО». 3
Автор-составитель: О.Ю. Тихонова преподаватель ОГОБУ СПО «ИТТриС». 3
Динамика: учебное пособие / авт.-сост.: О.Ю. Тихонова преподаватель ОГОБУ СПО «ИТТриС». - Иркутск: изд-во Иркутский техникум транспорта и строительства, 2014 - 59с. 3
Учебное пособие предназначено для студентов ОГОБУ СПО «ИТТриС», обучающихся по специальности 190623 «Техническая эксплуатация подвижного состава железных дорог» и 190631 «Техническое обслуживание и ремонт автомобильного». Данное пособие включает программу учебной дисциплины «Техническая механика», учебный материал по разделу статика, задачи и их решения, перечень литературы. 3
3
© ОГОБУ СПО «ИТТриС», 2014г. 3
Оглавление 4
Введение 5
Лекция 1. 6
Статика. Введение. 6
Лекция 2 12
Основные понятия и определения статики 12
Аксиомы статики 15
Теоремы статики 18
Лекция 3 19
Соединение тел между собой 19
Лекция 4 29
Условия равновесия пар сил. 34
Условия равновесия пар сил. 35
Лекция 5 35
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЗАДАННОМУ ЦЕНТРУ. УСЛОВИЯ РАВНОВЕСИЯ 35
Приведение силы к заданному центру. 35
Приведение системы сил к заданному центру. 36
Условия равновесия системы сил. 37
Условия равновесия пространственной системы 38
параллельных сил. 38
Условия равновесия плоской системы сил. 38
Теорема о трех моментах. 39
Лекция 6 42
Краткое содержание: Центр параллельных сил. Параллельные силы распределенные по отрезку прямой. Центр тяжести твердого тела, поверхности и линии. Способы определения координат центра тяжести. 42
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ. 42
ЦЕНТР ТЯЖЕСТИ. 42
Лекция 7 50
Введение
Теоретическая механика - это наука в которой изучаются механические движения вещественных форм материальных объектов.
Теоретическую механику называют еще классической механикой или механикой Ньютона.
Механическое движение - это перемещение материальных объектов в пространстве с течением времени без рассмотрения физических свойств этих объектов и их изменения в процессе движения.
Теоретическая механика изучает только вещественные формы материальных объектов. Элементарные частицы и различные поля не являются предметом изучения в теоретической механике.
Движение материальных объектов происходит в пространстве и во времени. Пространство является трехмерным пространством Эвклида.
Теоретическая механика является базой для других разделов механики (теории упругости, сопротивления материалов, теории механизмов и машин и пр.) и многих технических дисциплин.
Теоретическая механика делится на три части: статику, кинематику и динамику. Главной частью является динамика.
Изучение теоретической механики обычно начинается со статики.
Лекция 1.
Статика. Введение.
Статика - это раздел теоретической механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил.
Под равновесием тела в статике понимается состояние его покоя по отношению к другим телам, принимаемым за неподвижные.
Элементы векторной алгебры
В теоретической механике рассматриваются такие векторные величины как сила, моменты силы относительно точки и оси, момент пары сил, скорость, ускорение и другие.
1. Понятие вектора.
Для определенности рассматриваем прямоугольную декартову систему координат.
Вектор это направленный отрезок, который характеризуется длиной и направлением.
Операции над векторами. Вектора можно складывать и умножать на число.
 сумма двух векторов есть вектор
сумма двух векторов есть вектор
 произведение вектора на действительное число есть вектор
произведение вектора на действительное число есть вектор
 существует нулевой вектор
существует нулевой вектор
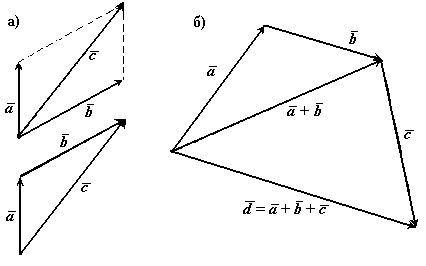
Рис. 1-1
В математике все вектора являются свободными, их можно переносить параллельно самим себе.
В сумме двух векторов (рис. 1-1а) начало второго вектора можно поместить в конец первого вектора, тогда сумму двух векторов можно представить как вектор, имеющий начало в начале первого вектора, а конец в конце второго вектора. Применяя это правило для суммы нескольких векторов (рис. 1-1б) получаем, что суммой нескольких векторов является вектор замыкающий ломаную линию, состоящую из слагаемых векторов.
Операции над векторами подчиняются следующим законам (см. рис. 1-2):



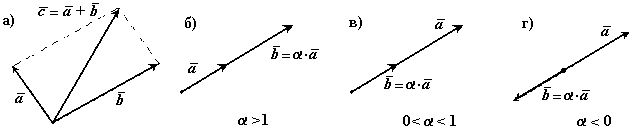
Рис. 1-2
2. Правые и левые системы координат.
Декартовы системы координат делятся на два вида: правую и левую. Рассмотрим декартовы системы координат на плоскости (см. рис. 1-3).
П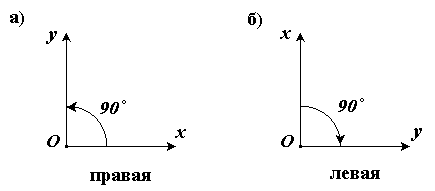
ри повороте оси Ox правой системы координат на 90о против часовой стрелки она совпадает с осью Oy .
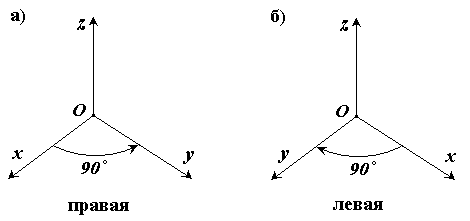
Рис. 1-3 Рис. 1-4
Рассмотрим декартовы системы координат в пространстве (см. рис. 1-4).
При повороте оси Ox правой системы координат вокруг оси Oz на 90о против часовой стрелки она совпадает с осью Oy .
3. Длина, проекции и направляющие косинусы вектора.
В дальнейшем будем рассматривать правую декартову систему координат. Единичные вектора вдоль осей Ox, Oy и Oz образуют систему единичных (или базисных) векторов. Любой вектор, имеющий начало в точке O, можно представить как сумму  числа (ax , ay , az ) - это проекции вектора
числа (ax , ay , az ) - это проекции вектора  на оси координат (см. рис. 1-5).
на оси координат (см. рис. 1-5).
Длина (или модуль) вектора определяется формулой  и обозначается
и обозначается  или
или 
Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону (см. рис. 1-6).
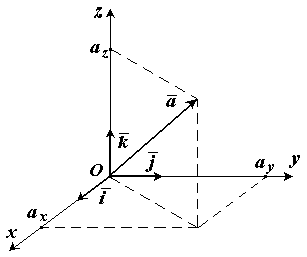
Рис. 1-5
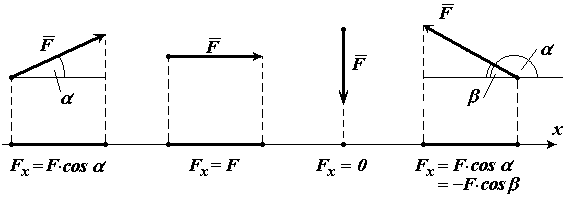
Рис. 1-6
Направляющими косинусами cos(), cos(), cos() вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.

Любая точка пространства с координатами (x, y, z) может быть задана своим радиус-вектором

Координаты (x, y, z) это проекции вектора ![]() на оси координат.
на оси координат.
4. Скалярное произведение двух векторов
Имеется два вектора  и
и  .
.  ,
,  .
.
Результатом скалярного произведения двух векторов и является скалярная величина (число).
Записывается как  или
или  . Скалярное произведение двух векторов равно
. Скалярное произведение двух векторов равно 
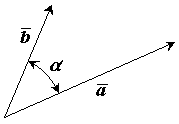
Рис. 1-7
Свойства скалярного произведения:




5. Векторное произведение двух векторов
Имеется два вектора и . ,  . Результатом векторного произведения двух векторов и является вектор
. Результатом векторного произведения двух векторов и является вектор  . Записывается как
. Записывается как  или
или  .
.
Векторное произведение двух векторов это вектор , перпендикулярный к обоим этим векторам, и направленный так, чтобы с его конца поворот вектора к вектору был виден против часовой стрелки.
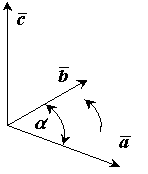
Рис. 1-8
Длина (или модуль) векторного произведения равна  .
.
Свойства векторного произведения:
Векторное произведение двух векторов вычисляется через их проекции следующим образом:



Лекция 2
Краткое содержание: Основные понятия и определения статики: материальная точка и абсолютно твердое тело, механическая система, сила, система сил. Аксиомы и теоремы статики.
Основные понятия и определения статики
Материальным телом называется некоторое количество вещества, которое заполняет какой-нибудь объем в пространстве. Возможны случаи, когда тело в тех или иных направлениях имеет весьма малые размеры по сравнению с размерами в других направлениях.
Материальной точкой называется простейшая модель материального тела любой формы, размеры которого достаточно малы, и которое можно принять за геометрическую точку, имеющую определенную массу.
Механическим воздействием одного тела на другое называется такое воздействие, при котором пренебрегают изменениями в химической структуре тела и его физическом состоянии. Если тело испытывает механическое воздействие со стороны других материальных тел, то оно может изменять свое движение в пространстве или оставаться в покое. Механическое воздействие может происходить как при соприкосновении тел, так и на расстоянии (притяжение, отталкивание).
Механической системой называется любая совокупность материальных точек.
Абсолютно твердым телом (или неизменяемой механической системой) называется материальное тело, геометрическая форма которого и размеры не изменяются ни при каких механических воздействиях со стороны других тел, а расстояние между любыми двумя его точками остается постоянным.
Cила - это основная количественная мера механического воздействия одного тела на другое, которая характеризует его интенсивность и направление.
Природа силы может быть различной. Это могут быть гравитационные, электромагнитные, упругие силы или силы давления. Теоретическая механика не интересуется природой сил.
Сила определяется точкой приложения, числовым значением и направлением действия, т.е. является векторной величиной.
Модуль силы находят путем ее сравнения с силой, принятой за единицу. Для статического измерения силы служат приборы, называемые динамометрами.
Силу как величину векторную обозначают какой-либо буквой со знаком вектора (например,  или
или  ). Для выражения числового значения силы или ее модуля используется знак модуля от вектора или те же буквы, но без знака вектора (например,
). Для выражения числового значения силы или ее модуля используется знак модуля от вектора или те же буквы, но без знака вектора (например,  и
и  или
или  и
и  ).
).
Системой сил называется группа сил, которые действуют на рассматриваемое тело или (в общем случае) на точки механической системы.
Если линии действия всех сил лежат в одной плоскости, то система сил называется плоской, а если эти линии действия не лежат в одной плоскости, - то система сил называется пространственной.
Системой сил эквивалентной нулю (или уравновешенной системой сил) называется такая система сил, действие которой на твердое тело или материальную точку, находящиеся в покое или движущиеся по инерции, не приводит к изменению состояния покоя или движения по инерции этого тела или материальной точки.

Две системы сил называются эквивалентными, если их действие по отдельности на одно и то же твердое тело или материальную точку одинаково при прочих равных условиях.

Равнодействующей силой рассматриваемой системы сил называется сила, действие которой на твердое тело или материальную точку эквивалентно действию этой системы сил. Равнодействующую силу обозначают обычно 

Уравновешивающей силой рассматриваемой системы сил называется сила, добавление которой к заданной системе сил дает новую систему, эквивалентную нулю.
Уравновешивающая сила равна по модулю равнодействующей и противоположна ей по направлению.
Сила, приложенная к телу в одной его точке называется сосредоточенной. Силы, действующие на все точки данного объема, данной части поверхности тела или данной части кривой, называются распределенными.
Понятие о сосредоточенной силе является условным. Силы, которые в механике рассматриваются как сосредоточенные, представляют собой равнодействующие некоторых систем распределенных сил.
Аксиомы статики
Аксиома о равновесии двух сил. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по величине и направлены вдоль одной прямой в противоположные стороны.
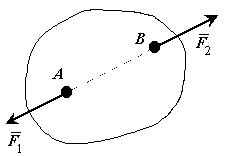
Рис. 2-1
Аксиома о добавлении (отбрасывании) уравновешенной системы сил. Если на твердое тело действует система сил, то к ней можно добавить (отбросить) уравновешенную систему сил. Полученная после добавления (отбрасывания) новая система сил эквивалентна первоначальной.
Аксиома параллелограмма сил. Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и равную по величине и направлению диагонали параллелограмма, построенного на этих силах, как на сторонах. 

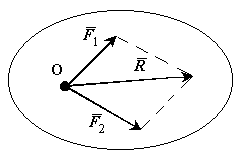
Рис. 2-2
Эта аксиома допускает и обратное утверждение:
Силу можно разложить бесчисленным множеством способов на две силы, приложенные в любой точке линии действия данной силы.
Аксиома о равенстве действия и противодействия. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Если к данному телу приложена сила воздействия от другого тела, то от данного тела к другому телу будет приложена сила  , равная и прямо противоположная силе
, равная и прямо противоположная силе ![]() . Силы приложены в одной геометрической точке, но к разным телам.
. Силы приложены в одной геометрической точке, но к разным телам.
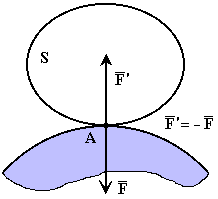
Рис. 2-3
Свободным твердым телом называется тело, имеющее возможность получать любое движение из данного положения, для чего необходимо приложить соответствующую силу.
При решении большинства задач механики приходится иметь дело с телами несвободными, т.е. лишенными возможности перемещаться в направлении действия приложенных к ним активных сил. Тела, ограничивающие движение рассматриваемого тела, называются связями. Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении называется силой реакции (противодействия) этой связи или просто реакцией связи.
Аксиома о связях. Эффект от действия связей такой же, как от действия определенных, дополнительных сил, которые могут быть приложены к свободному телу вместо связей.
Аксиому о связях называют также принципом освобождаемости от связей. Согласно этой аксиоме, не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией связи.
Силы, которые могут сообщать свободному телу движение, называются активными силами. Приложив к телу, кроме активных сил, реакции связей, можно рассматривать тело как свободное. Активные силы и силы реакции называются внешними силами.
Пусть, например, на гладкой неподвижной горизонтальной плоскости покоится шар. Плоскость, ограничивающая движение шара, является для него связью. Если мысленно освободить шар от связи, то для удержания его в покое к нему в точке касания с плоскостью нужно приложить силу  , равную по модулю весу шара
, равную по модулю весу шара ![]() и противоположную ему по направлению. Сила
и противоположную ему по направлению. Сила ![]() и есть реакция плоскости (реакция связи). Шар, освобожденный от связи, будет свободным телом, на которое действует задаваемая (активная) сила
и есть реакция плоскости (реакция связи). Шар, освобожденный от связи, будет свободным телом, на которое действует задаваемая (активная) сила  и реакция плоскости .
и реакция плоскости .
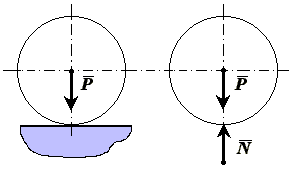
Рис. 2-4
Аксиома отвердевания. Равновесие механической системы не нарушается от наложения новых связей; в частности, равновесие механической системы не нарушится, если все части системы связать между собой неизменно, жестко.
Теоремы статики
Теорема о переносе силы вдоль линии действия. Действие силы на твердое тело не изменится от переноса силы вдоль своей линии действия.

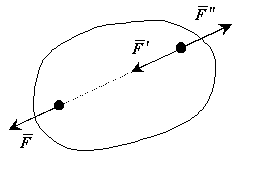


Рис. 2-5
Теорема о трех силах. Если твердое тело под действием трех сил, две из которых пересекаются в одной точке, находится в равновесии, то линии действия таких трех сил пресекаются в одной точке.


с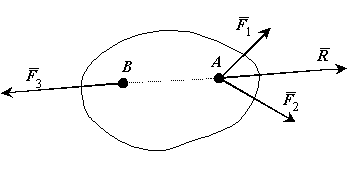 ледовательно силы пересекаются в одной точке.
ледовательно силы пересекаются в одной точке.
Рис. 2-6
Лекция 3
Краткое содержание: Соединение тел между собой и направление сил реакции связей. Система сходящихся сил. Условия равновесия системы сходящихся сил. Момент силы относительно точки. Момент силы относительно оси.
Соединение тел между собой
Отдельное тело может быть связано с другими телами разными способами.
Опирание на поверхность
Е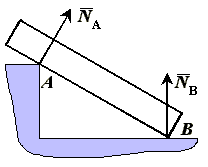 сли соприкасаются абсолютно гладкие тела, то силы взаимодействия между ними направлены по общей нормали к их поверхностям в точке соприкосновения.
сли соприкасаются абсолютно гладкие тела, то силы взаимодействия между ними направлены по общей нормали к их поверхностям в точке соприкосновения.
Рис. 3-1
Связь с помощью нитей (нить, цепь, трос)
Связь, осуществляемая в виде гибкой нерастяжимой и невесомой нити, не дает удаляться телу от точки подвеса нити вдоль нити. Поэтому реакция натянутой нити также направлена вдоль нити, к точке ее подвеса.
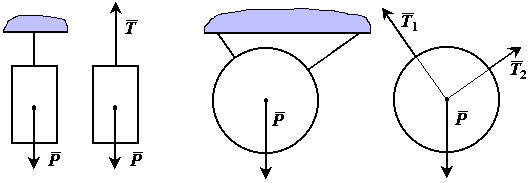
Рис. 3-2
Освободим гирю от связи разрезав (мысленно) нить в любом месте и добавив силу реакции связи, которую направим вдоль нити вверх (обозначим ее  ). Гиря становится свободным твердым телом на которое действуют две силы и при этом оно находится в покое. Согласно аксиоме о равновесии двух сил, силы
). Гиря становится свободным твердым телом на которое действуют две силы и при этом оно находится в покое. Согласно аксиоме о равновесии двух сил, силы  и равны по величине и противоположны по направлению.
и равны по величине и противоположны по направлению.
Вырежем (мысленно) кусочек нити в любом месте и добавим в местах разреза силы реакции связи (обозначим их и  ). Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы и равны по величине и действуют вдоль одной прямой в противоположные с
). Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы и равны по величине и действуют вдоль одной прямой в противоположные с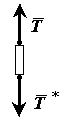 тороны. Реакция связи натянутой нити направлена вдоль нити
тороны. Реакция связи натянутой нити направлена вдоль нити
Соединение тел с помощью шарниров.
Шарниром называется устройство, связывающее тела и позволяющее совершать вращение одного тела относительно другого.
Цилиндрический шарнир допускает вращение тел вокруг одной оси (и скольжение вдоль нее).
Шарнирно-неподвижная опора препятствует любому поступательному движению, но дает возможность свободно вращаться вокруг оси шарнира.
Реакция ![]() шарнирно-неподвижной опоры проходит через центр шарнира О и лежит в плоскости перпендикулярной к оси шарнира, но ее модуль и направление неизвестны.
шарнирно-неподвижной опоры проходит через центр шарнира О и лежит в плоскости перпендикулярной к оси шарнира, но ее модуль и направление неизвестны.
Условные обозначения:
Шарнирно-подвижная опора ( шарнирно-неподвижная опора поставленная на катки) не препятствует перемещению параллельно опорной поверхности. Если не учитывать трения катков, то линия действия реакции такой опоры проходит через центр шарнира перпендикулярно опорной поверхности. Неизвестен только модуль этой реакции.
Условные обозначения:

Шаровой шарнир. Шаровым шарниром называется устройство, позволяющее сочлененным телам, имеющим общую точку сочленения, совершать вращение в пространстве относительно друг друга вокруг общей точки. Шаровой шарнир состоит из сферической чаши, находящейся на одном теле, и сферического выступа того же диаметра на другом. Реакция в шаровом шарнире может иметь любое направление в пространстве.
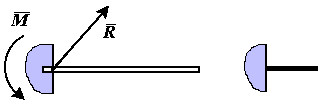
Жесткая заделка.
В случае заделки одного тела в другое реакция связи состоит из силы  и пары сил с моментом
и пары сил с моментом  . Величина и направление реакции определяется из общих уравнений равновесия твердого тела.
. Величина и направление реакции определяется из общих уравнений равновесия твердого тела.
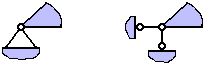
Пример 2-1. На невесомую трехшарнирную арку действует горизонтальная сила  . Определить линию действия реакции
. Определить линию действия реакции  (реакции связи в точке А).
(реакции связи в точке А).
Решение: Рассмотрим правую часть арки отдельно. В точках В и С приложим силы реакции связей  и
и  . Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы и равны по величине и действуют вдоль одной прямой в противоположные стороны. Таким образом направление силы нам известно (вдоль линии ВС).
. Тело под действием двух сил находится в равновесии. Согласно аксиоме о равновесии двух сил, силы и равны по величине и действуют вдоль одной прямой в противоположные стороны. Таким образом направление силы нам известно (вдоль линии ВС).
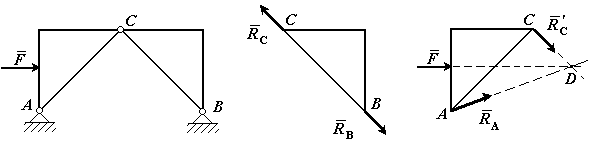
Рассмотрим левую часть арки отдельно. В точках А и С приложим силы реакции связей и  . Сила
. Сила  , действие равно противодействию. На тело действуют три силы, направления двух сил ( и .) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила
, действие равно противодействию. На тело действуют три силы, направления двух сил ( и .) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила  направлена вдоль линии AD.
направлена вдоль линии AD.
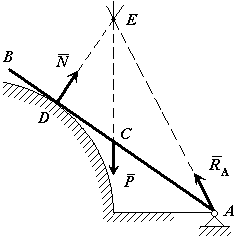
Пример 2-2. Однородный стержень закреплен шарнирно в точке А и опирается на гладкий цилиндр. Определить линию действия реакции ![]() (реакции связи в точке А).
(реакции связи в точке А).
Решение: Так как стержень однородный, то равнодействующая сил тяжести (сила ), действующих на стержень, приложена в его геометрическом центре (точка С). Так как стержень опирается на гладкую поверхность, то реакция связи (сила  ) в точке касания (точка D) направлена по нормали к этой поверхности. На тело действуют три силы, направления двух сил (и
) в точке касания (точка D) направлена по нормали к этой поверхности. На тело действуют три силы, направления двух сил (и![]() .) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила направлена вдоль линии AЕ.
.) известно. Согласно теореме о трех силах линии действия всех трех сил пресекаются в одной точке. Следовательно, сила направлена вдоль линии AЕ.
Система сходящихся сил
Системой сходящихся сил (или пучком сил) называется такая система сил, линии действия которой пересекаются в одной точке - центре пучка.
Равнодействующая системы сходящихся сил равна векторной сумме слагаемых сил и определяется замыкающей стороной силового многоугольника, построенного на слагаемых силах как на составляющих. Точка приложения равнодействующей силы совпадает с точкой пересечения линий действия сил.

Проекции равнодействующей силы на оси координат равны алгебраической сумме проекций составляющих сил на эти оси.
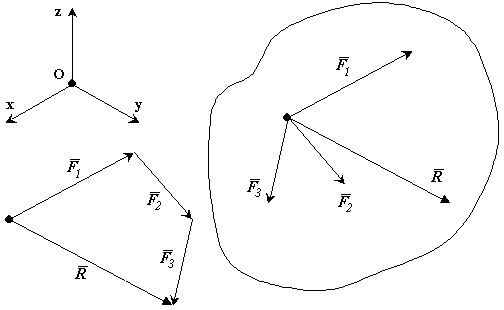
Рис. 3-3
Условия равновесия системы сходящихся сил в векторной форме
Для равновесия сходящейся системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая сила была равна нулю.
Условия равновесия системы сходящихся сил в алгебраической форме
Для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех прямоугольных осей координат были равны нулю.
Момент силы относительно точки
Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы, необходимо ввести новое понятие - момент силы относительно точки.
Рассмотрим силу  , приложенную к телу в точке А. Из некоторой точки О опустим перпендикуляр на линию действия силы .
, приложенную к телу в точке А. Из некоторой точки О опустим перпендикуляр на линию действия силы .
Плечом h силы относительно точки О называется кратчайшее расстояние между этой точкой и линией действия силы.
Через силу ![]() и точку О можно провести плоскость. Сила пытается вращать тело вокруг оси, которая проходит через точку О и которая перпендикулярна плоскости в которой лежит сила. Точка О называется моментной точкой.
и точку О можно провести плоскость. Сила пытается вращать тело вокруг оси, которая проходит через точку О и которая перпендикулярна плоскости в которой лежит сила. Точка О называется моментной точкой.
Моментом силы относительно точки О называется вектор  , приложенный в этой точке и равный векторному произведению радиус-вектора
, приложенный в этой точке и равный векторному произведению радиус-вектора  , соединяющего эту точку с точкой приложения силы, на вектор силы .
, соединяющего эту точку с точкой приложения силы, на вектор силы .
Рис. 3-4
Модуль вектора  равен произведению модуля силы
равен произведению модуля силы  на ее плечо
на ее плечо  .
.

Момент силы относительно точки О направлен перпендикулярно плоскости, в которой лежат сила и моментная точка (радиус-вектор), в том направлении откуда видно стремление силы вращать тело против движения часовой стрелки.
Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия.
Момент силы равен нулю, если линия действия силы проходит через моментную точку.
Если сила ![]() задана своими проекциями
задана своими проекциями  на оси координат и даны координаты
на оси координат и даны координаты  точки приложения этой силы, то момент силы относительно начала координат вычисляется следующим образом:
точки приложения этой силы, то момент силы относительно начала координат вычисляется следующим образом:
Проекции момента на оси координат равны:



Момент силы относительно оси
К твердому телу в точке А приложена сила  . Проведем в пространстве ось (например z). На оси z произвольно выберем точку О . Соединим точку О с точкой А радиус-вектором. Через точку О проведем плоскость П перпендикулярную оси z. Спроектируем вектора
. Проведем в пространстве ось (например z). На оси z произвольно выберем точку О . Соединим точку О с точкой А радиус-вектором. Через точку О проведем плоскость П перпендикулярную оси z. Спроектируем вектора  и
и  на плоскость П.
на плоскость П.
Моментом силы относительно оси называется вектор равный моменту проекции силы на плоскость П относительно точки О пересечения оси z с плоскостью П.
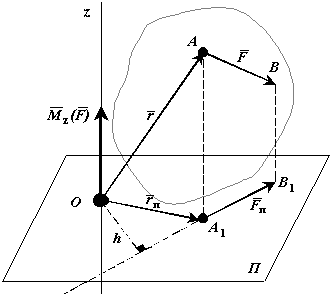
Рис. 3-3


Свойства момента силы относительно оси:
-
Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.
-
Момент силы относительно оси равен нулю, если линия действия силы пересекается с осью. В этом случае равно нулю плечо силы.
Связь момента силы относительно оси с моментом силы
относительно точки.
Проведем через точку О, где задан момент силы относительно точки декартовы оси координат x, y, z . Момент силы относительно точки можно представить в виде суммы трех векторов  . Эти вектора являются моментами силы относительно осей x, y, z соответственно.
. Эти вектора являются моментами силы относительно осей x, y, z соответственно.



Момент силы относительно оси равен проекции на эту ось момента силы относительно любой точки на оси.

Формулы для моментов силы относительно осей координат.
Если сила ![]() задана своими проекциями
задана своими проекциями  на оси координат и даны координаты точки приложения этой силы, относительно осей координат, то моменты силы относительно осей координат вычисляется следующим образом:
на оси координат и даны координаты точки приложения этой силы, относительно осей координат, то моменты силы относительно осей координат вычисляется следующим образом:



Лекция 4
Краткое содержание: Пара сил. Теорема о сумме моментов пары сил. Теорема об эквивалентности пар сил. Теорема о переносе пары сил в параллельную плоскость. Теорема о сложении пар сил. Условия равновесия пар сил.
ПАРА СИЛ
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абсолютно твердое тело.
Плоскостью действия пары сил называется плоскость в которой расположены эти силы.
Плечом пары сил d называется кратчайшее расстояние между линиями действия сил пары.
Моментом пары сил называется вектор , модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия сил пары в ту сторону, откуда пара видна стремящейся повернуть тело против хода часовой стрелки. 
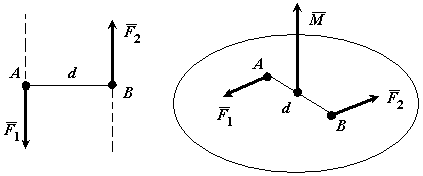
Рис. 4.1
Теорема о сумме моментов пары сил. Сумма моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора этой точки и равна моменту этой пары сил.

Доказательство: Выберем произвольно точку О. Проведем из нее в точки А и В радиус-векторы (Смотри Рис. 4.2).
 ,
, 

Что и требовалось доказать.
Р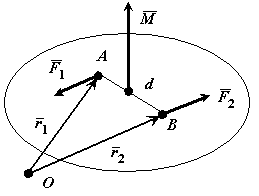
ис. 4.2
Две пары сил называются эквивалентными, если их действие на твердое тело одинаково при прочих равных условиях.
Теорема об эквивалентности пар сил. Пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющий одинаковый с первой парой момент.
Доказательство: Пусть на твердое тело действует пара сил  .
.
П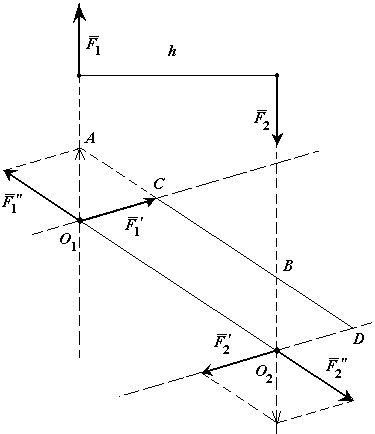 еренесем силу
еренесем силу  в точку
в точку  , а силу
, а силу  в точку
в точку  . Проведем через точки
. Проведем через точки  две любые параллельные прямые, пересекающие линии действия сил пары. Соединим точки отрезком прямой и разложим силы в точке и в точке по правилу параллелограмма.
две любые параллельные прямые, пересекающие линии действия сил пары. Соединим точки отрезком прямой и разложим силы в точке и в точке по правилу параллелограмма.
Так как , то
 и
и 
Поэтому эквивалентна системе  , а эта система эквивалентна системе
, а эта система эквивалентна системе  , так как
, так как  эквивалентна нулю.
эквивалентна нулю.
Таким образом мы заданную пару сил заменили другой парой сил . Докажем, что моменты у этих пар сил одинаковы.
Момент исходной пары сил численно равен площади параллелограмма ![]() , а момент пары сил численно равен площади параллелограмма
, а момент пары сил численно равен площади параллелограмма ![]() . Но площади этих параллелограммов равны, так как площадь треугольника
. Но площади этих параллелограммов равны, так как площадь треугольника  равна площади треугольника
равна площади треугольника  .
.
Что и требовалось доказать.
Выводы:
-
Пару сил как жесткую фигуру можно как угодно поворачивать и переносить в ее плоскости действия.
-
У пары сил можно изменять плечо и силы, сохраняя при этом момент пары и плоскость действия.
Теорема о переносе пары сил в параллельную плоскость. Действие пары сил на твердое тело не изменится от переноса этой пары в параллельную плоскость.
Доказательство: Пусть на твердое тело действует пара сил в плоскости  . Из точек приложения сил А и В опустим перпендикуляры на плоскость
. Из точек приложения сил А и В опустим перпендикуляры на плоскость  и в точках их пересечения с плоскостью
и в точках их пересечения с плоскостью ![]() приложим две системы сил
приложим две системы сил  и
и  , каждая из которых эквивалентна нулю.
, каждая из которых эквивалентна нулю.
Сложим две равные и параллельные силы и  . Их равнодействующая
. Их равнодействующая ![]() параллельна этим силам, равна их сумме и приложена посредине отрезка
параллельна этим силам, равна их сумме и приложена посредине отрезка  в точке О.
в точке О.
С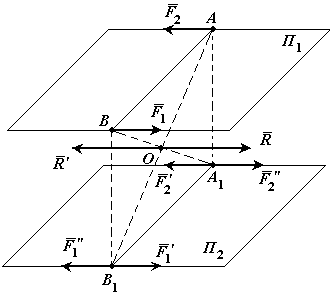 ложим две равные и параллельные силы и
ложим две равные и параллельные силы и  . Их равнодействующая
. Их равнодействующая ![]() параллельна этим силам, равна их сумме и приложена посредине отрезка
параллельна этим силам, равна их сумме и приложена посредине отрезка  в точке О.
в точке О.
Так как  , то система сил
, то система сил  эквивалентна нулю и ее можно отбросить.
эквивалентна нулю и ее можно отбросить.
Таким образом пара сил эквивалентна паре сил , но лежит в другой, параллельной плоскости. Что и требовалось доказать.
Следствие: Момент пары сил, действующий на твердое тело, есть свободный вектор.
Две пары сил, действующих на одно и то же твердое тело, эквивалентны, если они имеют одинаковые по модулю и направлению моменты.
Теорема о сложении пар сил. Две пары сил, действующих на одно и то же твердое тело, и лежащие в пересекающихся плоскостях, можно заменить одной эквивалентной парой сил, момент которой равен сумме моментов заданных пар сил. 
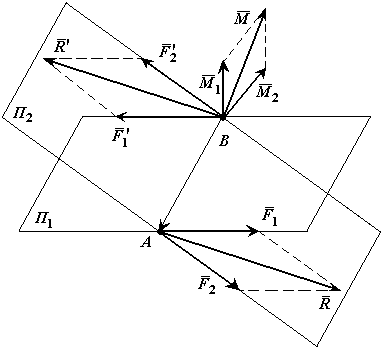
Доказательство: Пусть имеются две пары сил, расположенные в пересекающихся плоскостях. Пара сил  в плоскости характеризуется моментом
в плоскости характеризуется моментом  , а пара сил
, а пара сил  в плоскости характеризуется моментом
в плоскости характеризуется моментом  .
.
Расположим пары сил так, чтобы плечо пар было общим и располагалось на линии пересечения плоскостей. Складываем силы, приложенные в точке А и в точке В, 
 . Получаем пару сил .
. Получаем пару сил .

Что и требовалось доказать.
Условия равновесия пар сил.
Если на твердое тело действует несколько пар сил, как угодно расположенных в пространстве, то последовательно применяя правило параллелограмма к каждым двум моментам пар сил, можно любое количество пар сил заменить одной эквивалентной парой сил, момент которой равен сумме моментов заданных пар сил.
Условия равновесия пар сил.
Теорема. Для равновесия пар сил, приложенных к твердому телу, необхо-димо и достаточно, чтобы момент эквивалентной пары сил равнялся нулю. 
Теорема. Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций моментов пар сил на каждую из трех координатных осей была равна нулю.
Лекция 5
Краткое содержание: Приведение силы к заданному центру. Приведение системы сил к заданному центру. Условия равновесия пространственной системы параллельных сил. Условия равновесия плоской системы сил. Теорема о трех моментах. Статически определимые и статически неопределимые задачи. Равновесие системы тел.
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЗАДАННОМУ ЦЕНТРУ. УСЛОВИЯ РАВНОВЕСИЯ
Приведение силы к заданному центру.
Р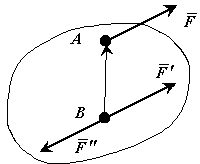 авнодействующая системы сходящихся сил непосредственно находится с помощью сложения сил по правилу параллелограмма. Очевидно, что аналогичную задачу можно будет решить и для произвольной системы сил, если найти для них метод, позволяющий перенести все силы в одну точку.
авнодействующая системы сходящихся сил непосредственно находится с помощью сложения сил по правилу параллелограмма. Очевидно, что аналогичную задачу можно будет решить и для произвольной системы сил, если найти для них метод, позволяющий перенести все силы в одну точку.
Теорема о параллельном переносе силы. Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Пусть сила ![]() приложена в точке A. Действие этой силы не изменяется, если в точке B приложить две уравновешенные силы. Полученная система трех сил представляет собой силу
приложена в точке A. Действие этой силы не изменяется, если в точке B приложить две уравновешенные силы. Полученная система трех сил представляет собой силу  равную , но приложенную в точке В и пару
равную , но приложенную в точке В и пару  с моментом
с моментом  . Процесс замены силы силой и парой сил называется приведением силы к заданному центру В .
. Процесс замены силы силой и парой сил называется приведением силы к заданному центру В .
Приведение системы сил к заданному центру.
Основная теорема статики (Пуансо).
Любую произвольную систему сил, действующую на твердое тело, можно в общем случае привести к силе и паре сил. Этот процесс замены системы сил одной силой и одной парой сил называется приведением системы сил к заданному центру.
Главным вектором системы сил называется вектор, равный векторной сумме этих сил.
Главным моментом системы сил относительно точки О тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки.
Формулы для вычисления главного вектора и главного момента



Формулы для вычисления модуля и направляющих косинусов главного вектора и главного момента
Условия равновесия системы сил.
Векторная форма.
Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор системы сил был равен нулю и главный момент системы сил относительно любого центра приведения также был равен нулю.
Алгебраическая форма.
Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.
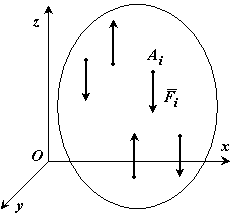
Условия равновесия пространственной системы
параллельных сил.
На тело действует система параллельных сил. Расположим ось Oz параллельно силам.
Уравнения ![]()
Для равновесия пространственной системы параллельных сил, действующих на твердое тело, необходимо и достаточно, чтобы сумма проекций этих сил была равна нулю и суммы моментов этих сил относительно двух координатных осей, перпендикулярным силам, также были равны нулю.
- проекция силы на ось Oz.
ПЛОСКАЯ СИСТЕМА СИЛ.
Условия равновесия плоской системы сил.
На тело действует плоская система сил. Расположим оси Ox и Oy в плоскости действия сил.
Уравнения ![]()
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма моментов этих сил относительно любой точки, находящейся в плоскости действия сил также была равна нулю.
Теорема о трех моментах.
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы моментов этих сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю.
Статически определимые и статически неопределимые задачи.
Для любой плоской системы сил, действующих на твердое тело, имеется три независимых условия равновесия. Следовательно, для любой плоской системы сил из условий равновесия можно найти не более трех неизвестных.
В случае пространственной системы сил, действующих на твердое тело, имеется шесть независимых условия равновесия. Следовательно, для любой пространственной системы сил из условий равновесия можно найти не более шести неизвестных.
Задачи, в которых число неизвестных не больше числа независимых условий равновесия для данной системы сил, приложенных к твердому телу, называются статически определимыми.
В противном случае задачи статически неопределимы.
Равновесие системы тел.
Рассмотрим равновесие сил, приложенных к системе взаимодействующих между собой тел. Тела могут быть соединены между собой с помощью шарниров или иным способом.
Силы, действующие на рассматриваемую систему тел, можно разделить на внешние и внутренние.
Внешними называются силы, с которыми на тела рассматриваемой системы действуют тела, не входящие в эту систему сил.
Внутренними называются силы взаимодействия между телами рассматриваемой системы.
При рассмотрении равновесия сил, приложенных к системе тел, можно мысленно расчленить систему тел на отдельные твердые тела и к силам, действующим на эти тела, применить условия равновесия, полученные для одного тела. В эти условия равновесия войдут как внешние, так и внутренние силы системы тел. Внутренние силы на основании аксиомы о равенстве сил действия и противодействия в каждой точке сочленения двух тел образуют равновесную систему сил.
Покажем это на примере системы двух тел и плоской системы сил.
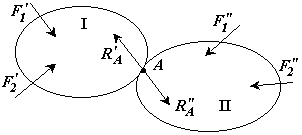
Если составить условия равновесия для каждого твердого тела системы тел, то для тела I 
 .
.
для тела II 

Кроме того, из аксиомы о равенстве сил действия и противодействия для двух взаимодействующих тел имеем 
 .
.
Представленные равенства и есть условия равновесия внешних сил, действующих на систему.
Реакция заделки.
Р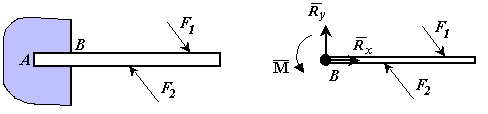
ассмотрим балку один конец которой АВ заделан в стену. Такое крепление конца балки АВ называется заделкой в точке В.
Пусть на балку действует плоская система сил. Определим силы, которые надо приложить к точке В балки, если часть балки АВ отбросить. К сечению балки (В) приложены распределенные силы реакции. Если эти силы заменить элементарными сосредоточенными силами и затем привести их к точке В, то в точке В получим силу  (главный вектор сил реакции) и пару сил с моментом М (главный вектор сил реакции относительно точки В) . Момент М называют моментом заделки или рективным моментом. Силу реакции можно заменить двумя составляющими
(главный вектор сил реакции) и пару сил с моментом М (главный вектор сил реакции относительно точки В) . Момент М называют моментом заделки или рективным моментом. Силу реакции можно заменить двумя составляющими  и
и  .
.
Заделка в отличие от шарнира создает не только неизвестную по величине и направлению реакцию , но еще и пару сил с неизвестным моментом М в заделке.
Лекция 6
Краткое содержание: Центр параллельных сил. Параллельные силы распределенные по отрезку прямой. Центр тяжести твердого тела, поверхности и линии. Способы определения координат центра тяжести.
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ.
ЦЕНТР ТЯЖЕСТИ.
Центр параллельных сил.
Для системы параллельных сил введем понятие центра параллельных сил.
На тело действует система параллельных сил  , приложенных в точках
, приложенных в точках  . Выберем оси координат так, чтобы ось Оz была параллельна силам.
. Выберем оси координат так, чтобы ось Оz была параллельна силам.
 ,
,  ,
, 
- проекция силы на ось Oz.
Точка С с координатами  называется центром параллельных сил .
называется центром параллельных сил .
- проекция силы на ось Oz.
Свойства центра параллельных сил:
-
Сумма моментов всех сил
относительно точки С равна нулю -
Если все силы повернуть на угол , не меняя точек приложения сил, то центр новой системы параллельных сил будет той же точкой С.
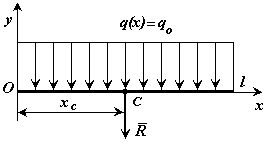
Параллельные силы распределенные по отрезку прямой.
а) общий случай
 - интенсивность распределенной силы [Н/м],
- интенсивность распределенной силы [Н/м],
 - элементарная сила.
- элементарная сила.
l - длина отрезка
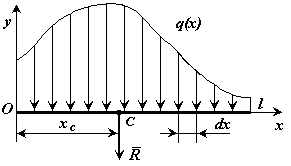
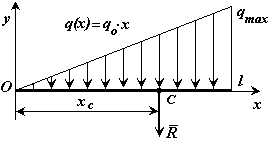
Распределенная по отрезку прямой сила интенсивности q(x) эквивалентна сосредоточенной силе  . Сосредоточенная сила прикладывается в точке С (центре параллельных сил) с координатой
. Сосредоточенная сила прикладывается в точке С (центре параллельных сил) с координатой
б) постоянная интенсивность
в) интенсивность, меняющаяся по линейному закону
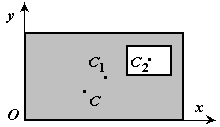
Центр тяжести.
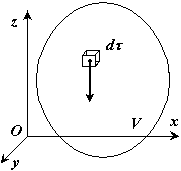
Центром тяжести тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела.
Координаты центра тяжести неоднородного твердого тела в выбранной системе отсчета определяются следующим образом:
 где
где
 - вес единицы объема тела (удельный вес)
- вес единицы объема тела (удельный вес)
 - Вес всего тела.
- Вес всего тела.
Для однородного твердого тела  и формулы получают вид:
и формулы получают вид:
 - Объем всего тела.
- Объем всего тела.
Если твердое тело представляет собой неоднородную поверхность, то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
где  - вес единицы площади тела,
- вес единицы площади тела,
 - Вес всего тела.
- Вес всего тела.
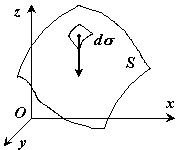
Для однородной поверхности  и формулы получают вид:
и формулы получают вид:
 - Площадь поверхности.
- Площадь поверхности.
Если твердое тело представляет собой неоднородную линию, то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
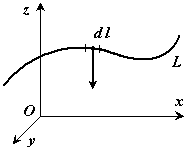
где  - вес единицы длины тела ,
- вес единицы длины тела ,
 - Вес всего тела.
- Вес всего тела.
Для однородной линии  и формулы получают вид:
и формулы получают вид:
 - Длина линии.
- Длина линии.
Способы определения координат центра тяжести.
Исходя из полученных выше общих формул, можно указать конкретные способы определения координат центров тяжести тел.
-
С
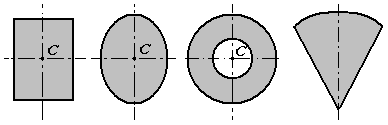
имметрия. Если однородное тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
2. Разбиение. Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести и площадь известны.
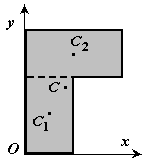
3. Дополнение. Частный случай способа разбиения. Он применяется к телам имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны.
Центр тяжести дуги окружности




Д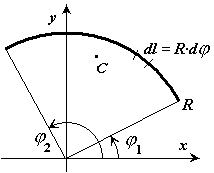 ля дуги равной половине окружности
ля дуги равной половине окружности  ,
,  ,
,  ,
, 
Центр тяжести площади сектора круга





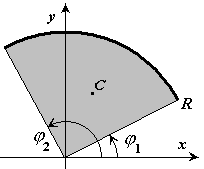
Для площади равной половине круга , , , 
Лекция 7
Краткое содержание: Трение скольжения. Законы Кулона. Угол и конус трения. Условия равновесия. Трение качения.
ТРЕНИЕ
Трение скольжения
Опыт показывает, что при стремлении двигать одно тело по поверхности другого в плоскости соприкосновения тел возникает сила сопротивления их относительному скольжению. Эту силу, называют силой трения скольжения.
Если твёрдое тело находится на абсолютно гладкой поверхности другого тела в равновесии, то реакция связи направлена по нормали к поверхности.
В действительности абсолютно гладких поверхностей не бывает. Все поверхности тел в той или иной степени шероховаты. Поэтому сила реакции  шероховатой поверхности при равновесии тела зависит от активных сил не только по числовой величине, но и по направлению.
шероховатой поверхности при равновесии тела зависит от активных сил не только по числовой величине, но и по направлению.
Разложим силу реакции шероховатой поверхности на составляющие: одну из которых ![]() направим по общей нормали к поверхности соприкосновения, а другую
направим по общей нормали к поверхности соприкосновения, а другую  направим в касательной плоскости к этим поверхностям.
направим в касательной плоскости к этим поверхностям.
Силой трения скольжения (или просто силой трения) называется составляющая силы реакции связи, которая лежит в касательной плоскости к поверхностям соприкасающихся тел.
Силой нормальной реакцией связи называется составляющая силы реакции связи, которая направлена по общей нормали к поверхностям соприкасающихся тел.
Природа силы трения очень сложная и Мы ее не касаемся. В теоретической механике предполагается, что между поверхностями соприкасающихся тел нет смазывающего вещества.
Сухим трением называется трение, когда между поверхностями соприкасающихся тел нет смазывающего вещества.
Будем рассматривать два случая: трения при покое или равновесии тела и трение скольжения при движении одного тела по поверхности другого с некоторой относительной скоростью.
При покое сила трения зависит только от активных сил. При выбранном направлении касательной в точке соприкосновения поверхностей тел сила трения вычисляется по формуле:
Аналогично при выбранном направлении нормали нормальная реакция выражается через заданные силы:
При движении одного тела по поверхности другого сила трения является постоянной величиной.
В инженерных расчетах обычно исходят из ряда установленных опытным путем закономерностей, которые с достаточной для практики точностью отражают основные особенности явления сухого трения. Эти закономерности называются законами трения скольжения или законами Кулона.
Законы Кулона
-
Сила трения скольжения находится в общей касательной плоскости соприкасающихся поверхностей тел и направлена в сторону, противоположную направлению возможного скольжения тела под действием активных сил. Сила трения зависит от активных сил, и её модуль заключён между нулём и максимальным значением, которое достигается в момент выхода тела из положения равновесия, то есть:
 - называется предельной силой трения.
- называется предельной силой трения.
-
Предельная сила трения скольжения при прочих равных условиях не зависит от площади соприкосновения трущихся поверхностей. Из этого закона следует, что для того чтобы сдвинуть, например кирпич, надо приложить одну и туже, силу, независимо, от того, какой гранью он положен на поверхность, широкой или узкой.
-
Предельная сила трения скольжения пропорциональна нормальной реакции (нормальному давлению), то есть
 ,
,
где безразмерный коэффициент  называют коэффициентом трения скольжения; он не зависит от нормальной реакции.
называют коэффициентом трения скольжения; он не зависит от нормальной реакции.
-
Коэффициент трения скольжения зависит от материала и физического состояния трущихся поверхностей, то есть от величины и характера шероховатости, влажности, температуры и других условий. Коэффициент трения устанавливается экспериментально.
Считается, что коэффициент трения не зависит от скорости движения.
Угол трения. Условия равновесия.
Многие задачи на равновесие тела на шероховатой поверхности, т.е. при наличии трения, удобно решать геометрически. Для этого введем понятие угла и конуса трения.
Реакция реальной (шероховатой) связи  слагается из двух составляющих: нормальной реакции
слагается из двух составляющих: нормальной реакции  и перпендикулярной ей силы трения
и перпендикулярной ей силы трения  . Следовательно, реакция связи отклоняется от нормали к поверхности на некоторый угол. При изменении силы трения от нуля до максимальной, сила реакции
. Следовательно, реакция связи отклоняется от нормали к поверхности на некоторый угол. При изменении силы трения от нуля до максимальной, сила реакции ![]() меняется от нуля до
меняется от нуля до  , а ее угол с нормалью растет от нуля до некоторого предельного значения .
, а ее угол с нормалью растет от нуля до некоторого предельного значения .
У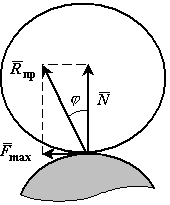 глом трения называется наибольший угол
глом трения называется наибольший угол  между предельной силой реакции шероховатой связи
между предельной силой реакции шероховатой связи ![]() и нормальной реакцией .
и нормальной реакцией .
 ;
;  ;.
;.
Угол трения  зависит от коэффициента трения.
зависит от коэффициента трения.
Конусом трения называют конус, описанный предельной силой реакции шероховатой связи  вокруг направления нормальной реакции.
вокруг направления нормальной реакции.
Пример.
Если к телу, лежащему на шероховатой поверхности, приложить силу Р, образующую угол  с нормалью, то тело сдвинется только тогда, когда сдвигающее усилие
с нормалью, то тело сдвинется только тогда, когда сдвигающее усилие  будет больше предельной силы трения
будет больше предельной силы трения  (если пренебречь весом тела, то
(если пренебречь весом тела, то  но неравенство
но неравенство

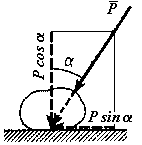
Выполняется только при  , т.е. при
, т.е. при  ,
,
Следовательно, ни какой силой, образующей с нормалью угол , меньший угла трения тело вдоль данной поверхности сдвинуть нельзя.
Для равновесия твёрдого тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на твёрдое тело, проходила внутри конуса трения или по его образующей через его вершину.
Тело нельзя вывести из равновесия любой по модулю активной силой, если её линия действия проходит внутри конуса трения.
Пример.
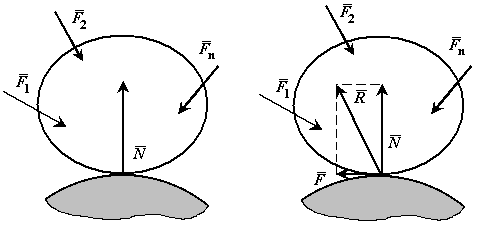
Рассмотрим тело имеющее вертикальную плоскость симметрии. Сечение тела этой плоскости имеет форму прямоугольника. Ширина тела равна 2a.
К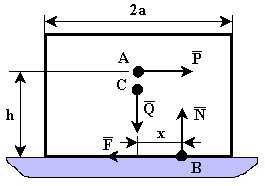
телу в точке С, лежащей на оси симметрии, приложена вертикальная сила  и в точке А, лежащей на расстоянии h от основания, горизонтальная сила
и в точке А, лежащей на расстоянии h от основания, горизонтальная сила  . Реакция плоскости основания (реакция связи) приводится к нормальной реакции и силе трения . Линия действия силы неизвестна. Расстояние от точки С до линии действия силы обозначим x. (
. Реакция плоскости основания (реакция связи) приводится к нормальной реакции и силе трения . Линия действия силы неизвестна. Расстояние от точки С до линии действия силы обозначим x. ( ). Составим три уравнения равновесия:
). Составим три уравнения равновесия:



Согласно закону Кулона  , т.е.
, т.е.  . (1)
. (1)
Так как  , то
, то  (2)
(2)
Проанализируем полученные результаты:
Будем увеличивать силу  .
.
-
Если
 , то равновесие будет иметь место до тех пор, пока сила трения не достигнет своей предельной величины, условие (1) превратится в равенство. Дальнейшее увеличение силы приведет к скольжению тела по поверхности.
, то равновесие будет иметь место до тех пор, пока сила трения не достигнет своей предельной величины, условие (1) превратится в равенство. Дальнейшее увеличение силы приведет к скольжению тела по поверхности. -
Если
 , то равновесие будет иметь место до тех пор, пока сила трения не достигнет величины
, то равновесие будет иметь место до тех пор, пока сила трения не достигнет величины  , условие (2) превратится в равенство. Величина x будет равна h. Дальнейшее увеличение силы приведет к тому, что тело станет опрокидываться вокруг точки B (скольжения не будет).
, условие (2) превратится в равенство. Величина x будет равна h. Дальнейшее увеличение силы приведет к тому, что тело станет опрокидываться вокруг точки B (скольжения не будет).
Трение качения
Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого.
Рассмотрим цилиндрический каток радиуса r на горизонтальной плоскости. Под катка и плоскости в месте их соприкосновения могут возникнуть реакции, препятствующие действием активных сил каток может катиться по плоскости. Из-за деформации поверхностей не только скольжению, но и качению.
Активные силы, действующие на катки в виде колес, обычно состоят из силы тяжести , горизонтальной силы  , приложенной к центру катка, и пары сил с моментом
, приложенной к центру катка, и пары сил с моментом ![]() , стремящейся катить колесо. Колесо в этом случае называется ведомо-ведущим. Если
, стремящейся катить колесо. Колесо в этом случае называется ведомо-ведущим. Если  , а
, а  , то колесо называется ведомым. Если
, то колесо называется ведомым. Если  , а
, а  , то колесо называется ведущим.
, то колесо называется ведущим.
Соприкосновение катка с неподвижной плоскостью из-за деформации катка и плоскости происходит не в точке, а по некоторой линии BD. По этой линии на каток действуют распределенные силы реакции. Если привести силы реакции к точке А, то в этой точке получим главный вектор этих распределенных сил с составляющими (нормальная реакция) и (сила трения скольжения), а также пару сил с моментом .
Р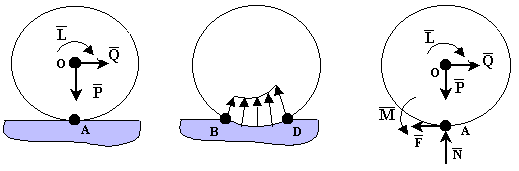
ассмотрим равновесие катка. Система сил - плоская. Запишем уравнения равновесия системы сил.
(x) 
(y) 
(MA) 
Момент называется моментом трения качения. Наибольшее значение М достигается в момент начала качения катка по плоскости.
Установлены следующие приближенные законы для наибольшего момента пары сил, препятствующих качению.
1. Наибольший момент пары сил, препятствующих качению, в довольно широких пределах не зависит от радиуса катка.
2. Предельное значение момента  пропорционально нормальной реакции
пропорционально нормальной реакции  .
.
 .
.
Коэффициент пропорциональности k называют коэффициентом трения качения при покое. Размерность k - это размерность длины.
3. Коэффициент трения качения k зависит от материала катка, плоскости и физического состояния их поверхностей. Коэффициент трения качения при качении в первом приближении можно считать не зависящим от угловой скорости качения катка и его скорости скольжения по плоскости.
Для вагонного колеса по рельсу  мм.
мм.
Рассмотрим движение ведомого колеса. , а .
Качение колеса начнется, когда выполнится условие  или
или 
Скольжение колеса начнется, когда выполнится условие  .
.
Обычно отношение  и качение начинается раньше скольжения.
и качение начинается раньше скольжения.
Если  , то колесо будет скользить по поверхности, без качения.
, то колесо будет скользить по поверхности, без качения.
Список используемой литературы
-
Аркуша А.И. Техническая механика. Теоретическая механика и сопротивление материалов - М.: Высшая школа, 1989.
-
Бабенков И.С. Основы статики и сопротивления материалов. М., 2008
-
Краткий курс теоретической механики С.М. Тарг.
-
Методические указания к решению задач по теоретической механике. В.Н. Адамов.
-
Мовнини Н.С., Израелит А.Б., Рубашкин А.Г.. Основы технической механики. - Л.: Машиностроение, 1990.
-
Никитин Г.М. Теоретическая механика для техникумов. - М.: Наука, 1988.
-
Руководство к решению задач по теоретической механике. Т.Б. Айзенберг, И.М. Воронков, В.М. Осецкий.
-
Смокотин Г.Я. Курс лекций по статике. Томск, 1984 Биргер И.А., Мавлютов Р.Р. Сопротивление материалов. М., 2006
-
Теоретическая механика в примерах и задачах (том 1). М.И.Бать, Г.Ю. Джанелидзе, А.С. Кельзон.
-
Теоретическая механика. В.М. Старжинский.
59